This project exists because I bought 30 sticks of 16GB DDR4-3200 RDIMM for an EPYC build in early April: an r/homelabsales find at $80 a stick, which was a fair price that day. The problem is that “that day” turned out to be the exact top of the market. Buying the top is pretty standard for me. Then the server wouldn’t POST with at least 4 of the sticks installed, and of the 16 that made it in, 4 more start throwing ECC errors the moment I do anything memory-heavy (LLM inferencing, which is of course why I bought them). There are still 6 untested sticks in the box. I knew the going rate; what I couldn’t see was where prices were headed or which sticks would actually work. A price tracker with real sold history fixes at least the first problem.
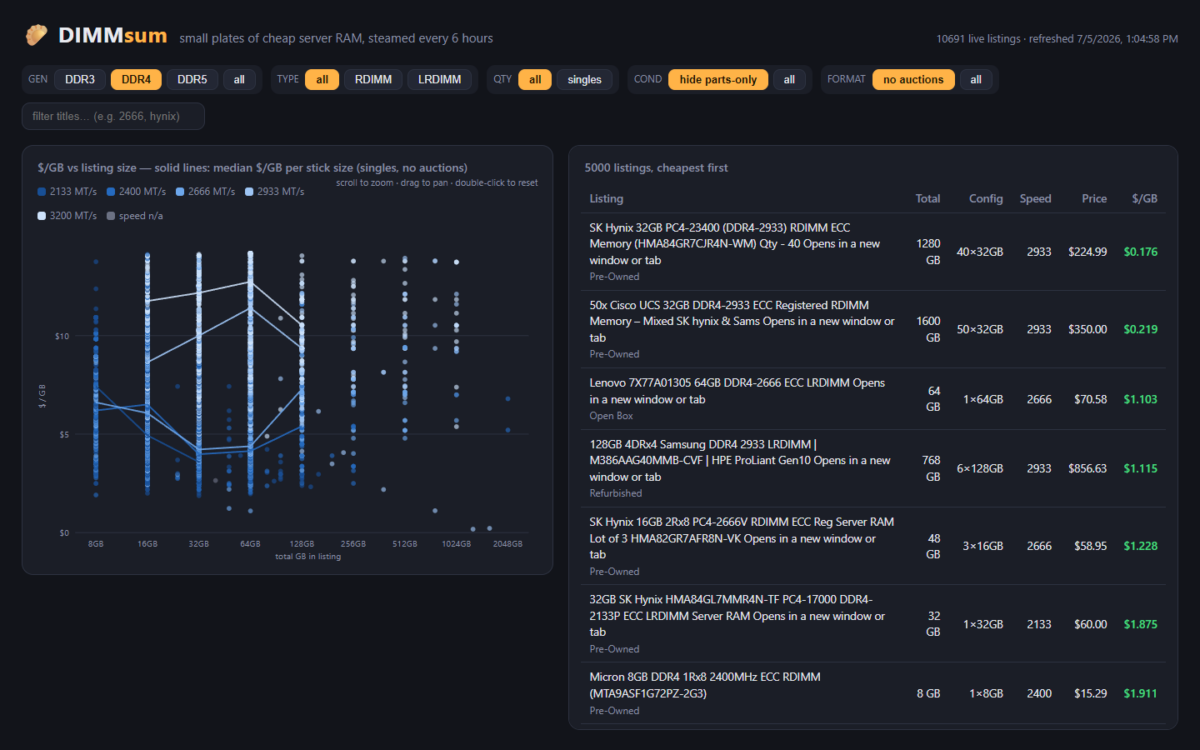
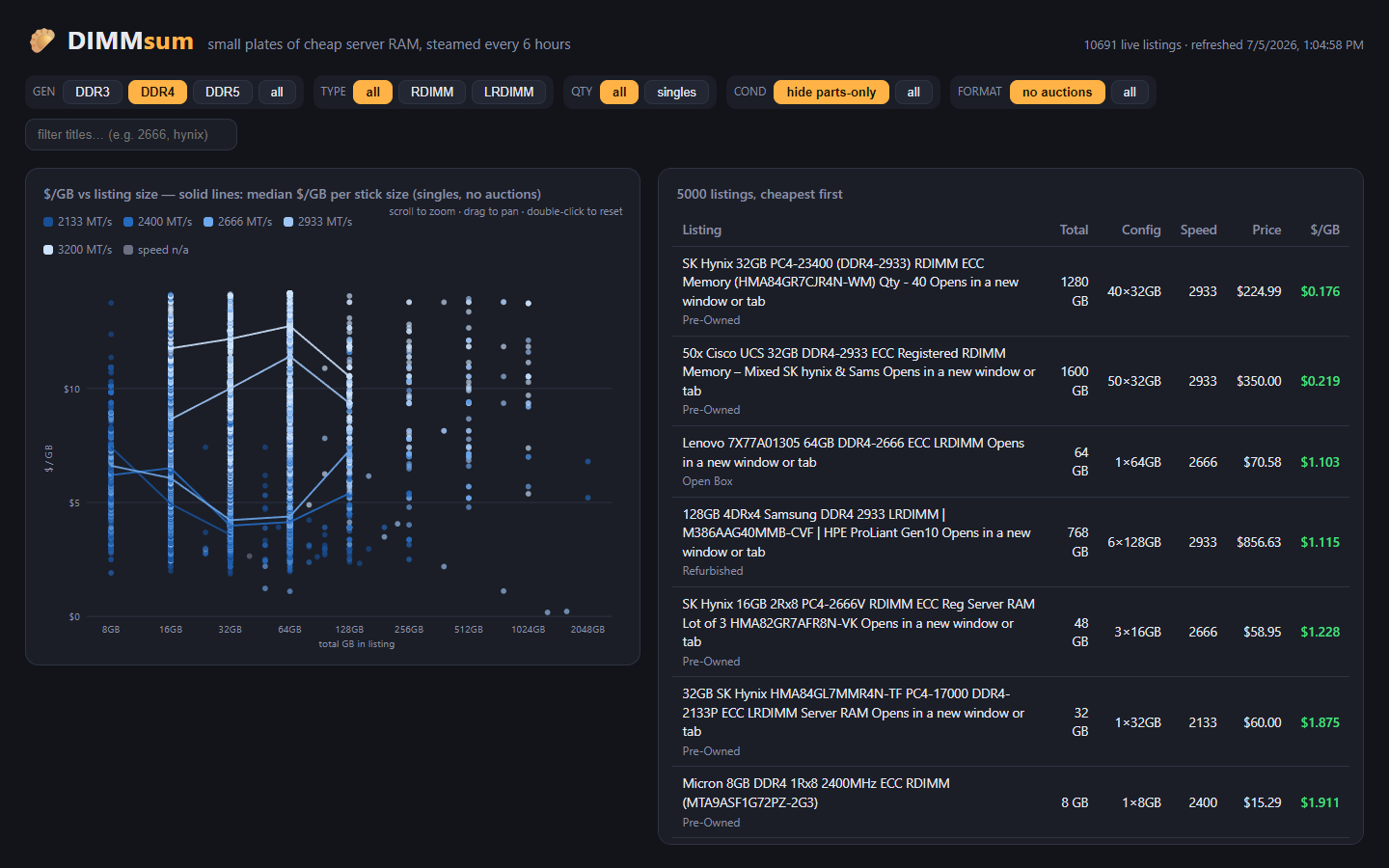
Beyond my own bad luck, the general problem is that eBay search results for server RAM are a mess. “32GB (2x16GB)” is two 16GB sticks, not one 32GB stick. The same 2666 MT/s speed shows up as DDR4-2666, PC4-21300, PC4-2666V, or just “2666V” depending on the seller’s mood. Lots of 8, lots of 32, single sticks, and “FOR PARTS” boards are all mixed together in the same results. Comparing actual price per gigabyte across all of that by hand is miserable.
LabGopher solved this years ago for whole servers, and I have wanted the RAM equivalent basically forever. So I built it: DIMMsum, a free site that scrapes eBay every 6 hours, normalizes the listing titles with an LLM, and charts everything as $/GB with median market lines per speed grade.
Welcome to Austin’s Nerdy Things, where we deploy a browser farm and a language model to avoid doing mental math on eBay listings.
My first attempt (2024) was bad
This is actually my second run at scraping eBay. Back in 2024 I wrote a requests + BeautifulSoup scraper that pulled search results through free SOCKS proxies from public proxy lists. It mostly worked, in the sense that it is technically still running on an LXC in my basement, appending to a parse.log that is now 636MB. The proxies were garbage (free proxies are free for a reason), the regex title parsing was wrong constantly, and I never did anything with the data. Classic.
Two things changed since then: eBay got much more aggressive about blocking scrapers, and LLMs got cheap enough to throw at every single listing title. Both of those turned out to matter a lot.
eBay does not want to be scraped (by robots that look like robots)
The 2024 approach is completely dead in 2026. Plain HTTP clients like requests do not even get to say hello anymore – eBay identifies them as robots essentially instantly and serves a 403 or the “Pardon Our Interruption” page. My first attempts with an automated browser got generic eBay error pages on search URLs too, while the exact same URLs worked fine by hand. That one had me confused for a while.
I am going to spare you the play-by-play here, partly because it would be a bot-evasion cookbook published by a site that participates in eBay’s own affiliate program, which seems unwise. The short version: the fix was embarrassingly simple, and it amounted to using a real browser (Playwright driving full Chromium) and having it behave like a polite human instead of a robot in a hurry. Take the path a person would take, slow down, keep the footprint small. No proxies, no stealth plugins, one IP, 3-6 second randomized delays between pages, and eBay has been perfectly happy serving me 240 listings per page ever since – a few hundred page loads a day, total.
The query matrix (or: making the search do half the parsing)
Instead of one broad “ddr4 rdimm” search, DIMMsum runs 51 very specific queries, one per capacity + speed + module type combo:
32gb (2666,pc4-21300,2666v) rdimm -2x16 -4x8 -8x4
The parenthesized part is eBay OR syntax covering the speed synonyms, and the negative terms exclude kit notation so results skew toward true single sticks. The neat part is that each query doubles as a weak label: if a listing was found by the 32GB 2666 RDIMM query but parses out as a 16GB stick, something is off (a lot, a mislabel, or a parse bug), and it gets flagged with a little warning icon in the UI instead of silently polluting the chart.
LLM title parsing for $0.09 per thousand listings
Here is a real title from the database:
2048GB 128x16GB DDR3 PC3L-10600R ECC Reg Server Memory RAM
That is 128 sticks of 16GB low-voltage DDR3-1333 RDIMM. My 2024 regex parser had no chance. The domain rules are genuinely fiddly: a PC3L prefix means low voltage, but a trailing L on the PC number (PC3-14900L) means LRDIMM, and both can appear in the same token. Kit notation states the total first. “LOT” without a count does not mean quantity greater than one. Part numbers are more authoritative than the title text around them.
Rather than encoding all that in regex, every title goes through DeepSeek (deepseek-v4-flash, their cheap model) with a system prompt full of those domain rules, returning structured JSON validated by a pydantic schema:
Titles are batched 25 per API call with an index round-trip check so a misaligned response fails loudly instead of assigning specs to the wrong listings. Against a hand-labeled fixture set it scored 97.4% field accuracy on the first eval run, and the misses were fields that only existed encoded inside part numbers (a future deterministic PN-decode layer will catch those).
The economics are the part that still makes me smile. At roughly $0.09 per 1,000 titles, the total LLM bill for parsing every listing DIMMsum has ever seen is about two dollars. This pipeline was not possible on a hobby budget three years ago; now it is basically free.
The plumbing
Everything lands in Postgres on my Proxmox cluster (one VM for the scraper + web app, one for the database). A systemd timer scrapes every 6 hours, and each run records a price snapshot per listing, which means DIMMsum builds its own price history for every item it tracks. The web side is FastAPI plus one vanilla JavaScript file. No framework. The whole site is a scatter chart, a table, and some server-rendered spec pages.
Current state of the database after a few days of running:
Metric
Count
RAM listings tracked
10,697
Price snapshots
104,475
Search queries per run
51
Scrape frequency
every 6 hours
LLM parse cost, lifetime
~$2
Claude (Fable 5, via Claude Code) wrote most of this code with me over a few evenings. The architecture arguments were real arguments and it lost some of them, but I will happily credit it with the claim-column work queue pattern that lets me run parallel parse workers against Postgres without them stepping on each other.
Sold prices (the part I am most excited about)
Active listing prices tell you what sellers are asking. Sold prices tell you what buyers actually paid, and those are very different numbers on eBay.
I assumed for months that scraping sold/completed listings was off the table and never actually tested it. Turns out the same polite-human browsing approach handles the sold/completed view just fine, and eBay hands you sold prices with dates, 240 per page. I was wrong for months for no reason. Test your assumptions, folks.
So as of this week DIMMsum also harvests sold listings weekly into their own table. The first sweep pulled in over 8,000 real sales, and the sold history goes back further than the ~90 days I expected (most of the usable volume reaches back to late 2025). That data is going to power a monthly “state of the used RAM market” report: median $/GB by SKU, month over month, from real transactions. The June data already shows 8GB DDR4-2133 RDIMMs sliding from $3.50/GB in April to $3.12 in June, and that is exactly the kind of thing I want a monthly email about.
There is a signup box at the bottom of dimmsum.com for exactly that report. One email a month, actual data, no other nonsense.
Disclosure and what’s next
The site is monetized with eBay Partner Network affiliate links: if you click through and buy, eBay pays a commission. That is the entire business model. Free site, no ads, no accounts, and the full disclosure lives in the footer.
Next up: the monthly sold-price report, a storage version (same idea, $/TB for used enterprise SSDs and HDDs, already in progress as a separate project), and a part-number decode table to squeeze out the last few percent of parse accuracy.
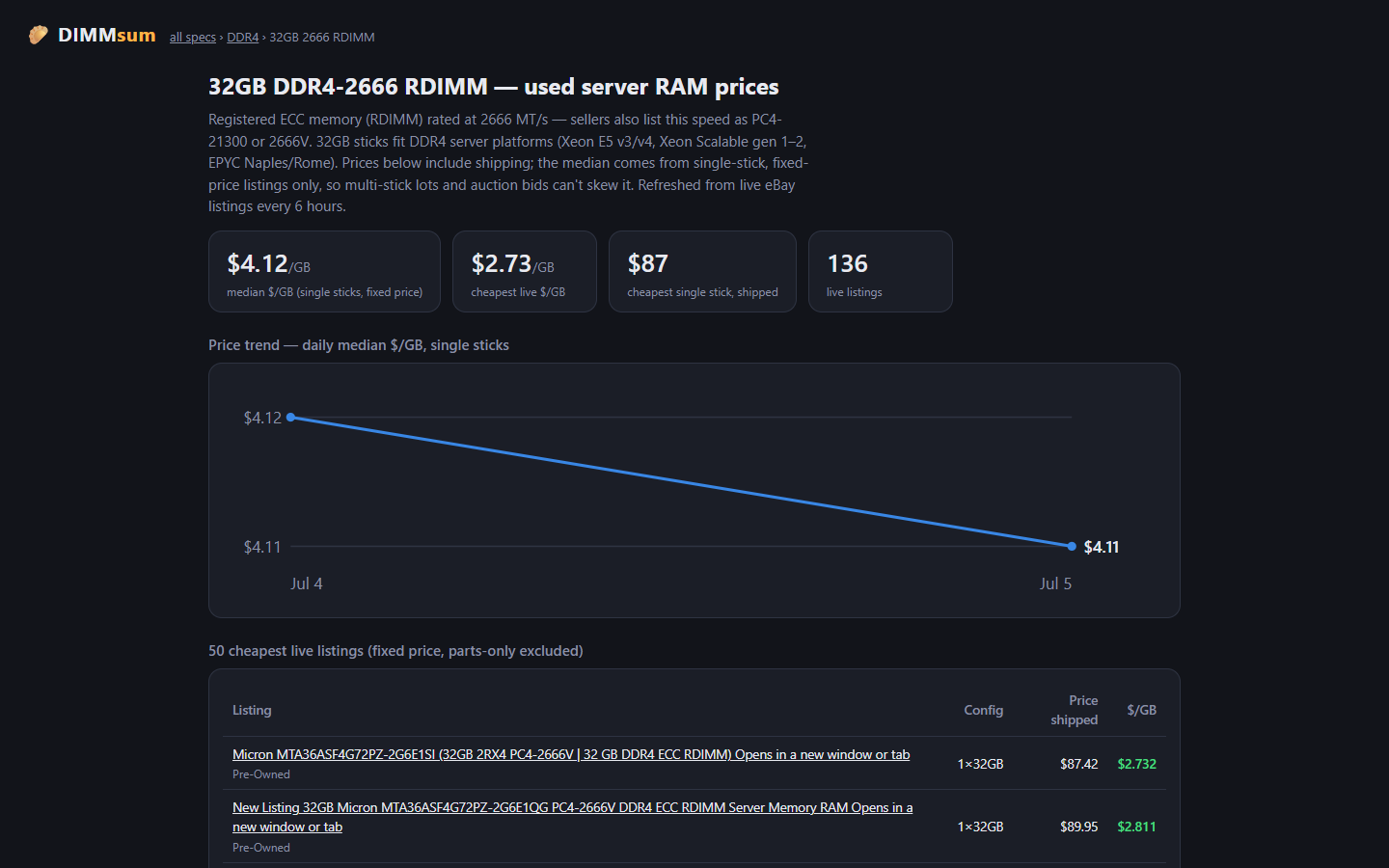
Go find some cheap RDIMMs at dimmsum.com. My benchmark SKU (32GB DDR4-2666 RDIMM singles) has a median around $132 a stick right now with the floor meaningfully below that, and now I get to watch the market instead of refreshing eBay searches like an animal.
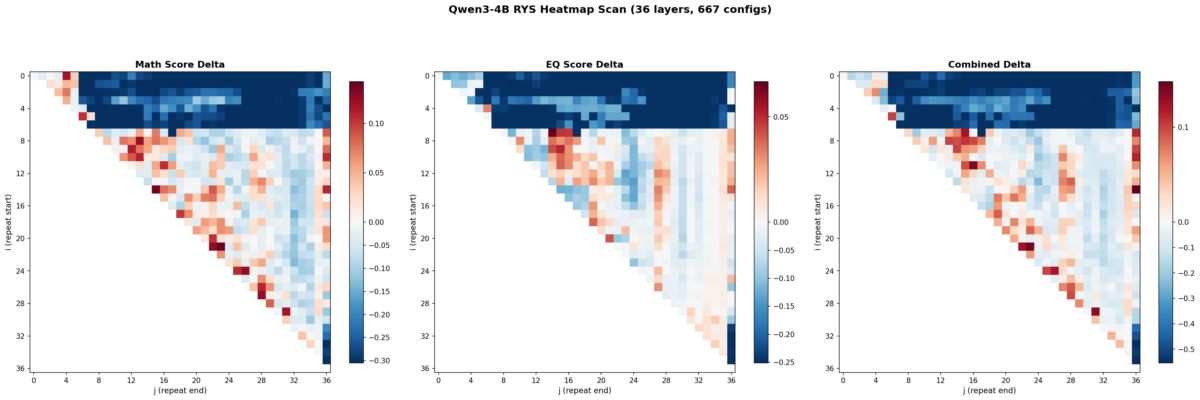
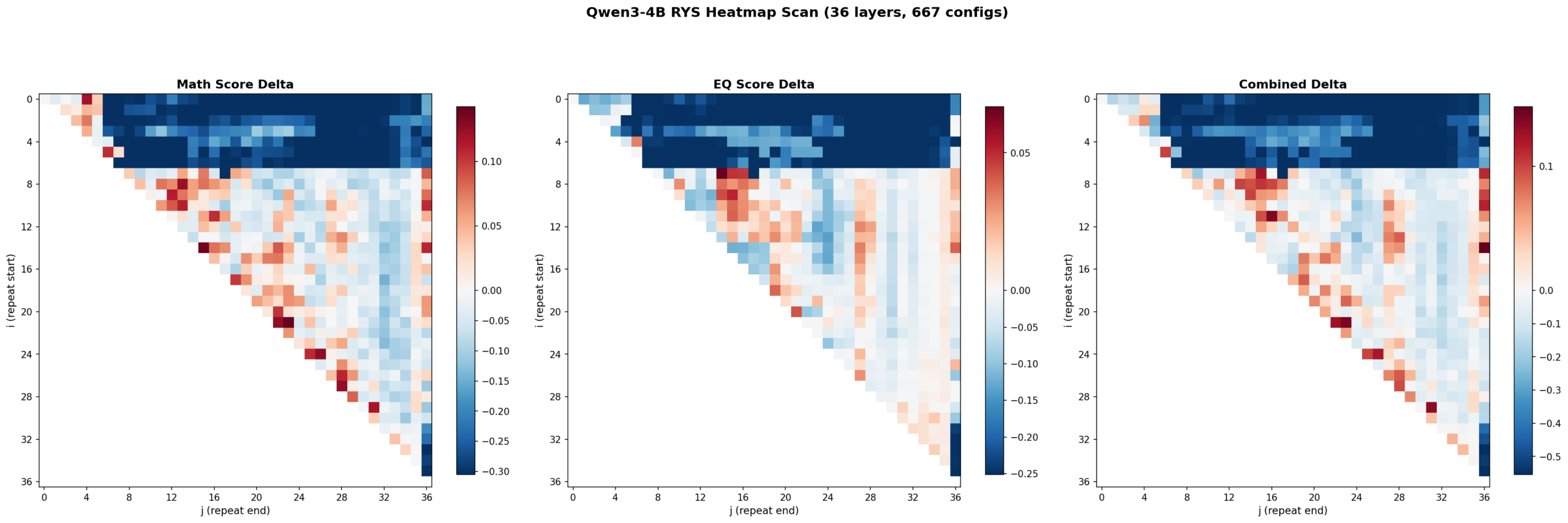
Math delta (left), EQ delta (center), and combined delta (right) across all 667 (i,j) layer duplication configs. The three-phase encode/reason/decode anatomy is clearly visible at 4B scale.
I’ve been messing around with local LLMs on my 3090 for a while now — I have a growing collection of Qwen models on D:\LLM that I probably should be embarrassed about. A few weeks ago I stumbled across David Noel Ng’s LLM Neuroanatomy blog posts, where he showed that you can take a pretrained transformer and literally just re-run some of its middle layers a second time at inference, no retraining needed, and get meaningfully better outputs.
The D:\LLM folder. I should probably be embarrassed about this.
The idea is wild: the model’s weights don’t change. You just tell it “hey, run layers 15 through 21 again” and the hidden state gets another pass through those same weights. Ng showed this working on Qwen3.5-27B (a 64-layer model) with up to +15.6% improvement on combined math and emotional reasoning benchmarks.
Naturally, I wanted to know if this works on smaller models too. Welcome to Austin’s Nerdy Things, where we perform brain surgery on 4-billion-parameter language models to make them think twice.
Background: What Is RYS?
Ng’s technique is called RYS and the core concept is surprisingly simple. A normal transformer forward pass goes:
Process input through layers 0, 1, 2, …, N-1 sequentially
Done
With RYS, you pick a contiguous block in the middle — layers i through j-1 — and after the model finishes layer j-1, you jump back and re-execute layers i through N-1. Those middle layers run twice on the evolving hidden state.
The reason this can work is that transformer layers aren’t all doing the same thing. Ng’s work showed models have a recognizable three-phase anatomy:
Early layers (~0-15% depth): Encoding. Converting tokens into contextualized representations. Repeating these produces garbage — the model tries to re-encode already-encoded stuff.
Middle layers (~20-60% depth): Reasoning. The actual thinking. Repeating these is like giving the model extra time to work through the problem.
Late layers (~70-100% depth): Decoding. Converting internal representations back into token predictions. Repeating these also produces garbage.
Ng found the sweet spot consistently in the middle, and his RYS repo provides all the tooling to test this — layer duplication wrappers, benchmark probe sets, the whole thing.
But his experiments were on a 27B model with 64 layers. I wanted to know: does this three-phase anatomy even exist at 4B scale? Can you exploit it on consumer hardware?
The Setup
Model: Qwen3-4B. I picked this one specifically because it’s a pure dense transformer (36 layers, 2560 hidden dim, GQA with 32 Q / 8 KV heads, RoPE, BF16). The Qwen3.5-2B has hybrid linear/full attention which would complicate things, and Qwen3-4B is in the same model family as Ng’s 27B target, which makes cross-scale comparison cleaner.
Hardware: My trusty RTX 3090 (24 GB VRAM). The model takes about 8.1 GB at baseline, which leaves plenty of room for the KV cache overhead from layer duplication.
Benchmarks: I used Ng’s probe sets from the RYS repo:
Math-16: 16 hard math questions (square roots, cube roots, big multiplications) requiring single-integer answers. Scored with digit-level partial credit. No chain-of-thought allowed. Greedy decoding, 64 max new tokens.
EQ-16: 16 EQ-Bench scenarios — complex social dialogues where the model predicts 4 emotion intensities on a 0-10 scale. Max 256 new tokens.
I used /no_think to disable Qwen3’s thinking mode so we’re measuring raw single-pass capability, and greedy decoding (do_sample=False), which I verified is perfectly deterministic across 5 runs on the same input. No need for multi-run variance testing.
The sweep: All 667 valid (i, j) configurations for a 36-layer model, including baseline (0, 0). Every config runs all 32 probe questions. I added early stopping that triggers if the first 2 math probes both produce garbage (saves about 30% of wall time on broken configs). The scanner saves results to JSON after every single config — resume-friendly for when Windows decides it’s update time.
Total sweep time: about 9 hours on a single 3090. Claude helped me write the scanner script (with me providing the architecture decisions and Ng’s RYS library doing the heavy lifting on layer manipulation).
Baseline Scores
Before messing with anything, Qwen3-4B scores:
Probe
Score
Math-16
0.305
EQ-16
0.749
Combined
1.054
The math score looks low, but these are genuinely hard problems (like “what is the cube root of 1019330085047 times 31?”) and the scorer gives partial credit for getting digits right. The EQ score is actually solid — Qwen3-4B is pretty decent at predicting emotional dynamics even without chain-of-thought.
The Heatmaps
Here’s where it gets fun. I swept all 667 configs and plotted the results as heatmaps. Each cell is one (i, j) configuration. Red means improvement over baseline. Blue means degradation. The x-axis is j (where the repeated block ends) and the y-axis is i (where it starts).
Left: math delta. Center: EQ delta. Right: combined delta. Red = improvement, blue = degradation. 667 configs, 36 layers.
Three things jumped out immediately.
1. The three-phase anatomy is clearly present at 4B scale
The top-left corner (early layers duplicated with wide spans) is deep blue — that’s the encoding zone. The bottom-right corner (late layers) is also blue — that’s the decoding zone. The productive region runs diagonally through the middle. This is exactly the encode / reason / decode structure Ng found at 27B.
Layers 0-6 are the encoding wall. Repeat anything starting before layer 5 with a wide span and the model outputs garbage. Layers 30+ are decoding territory — also garbage if you repeat there. The productive zone lives between layers ~5 and ~27, spanning roughly 60% of the model.
2. Math and EQ have different hot zones
This was something I wasn’t expecting. The math heatmap shows gains across a broad band from mid-stack to upper layers. The EQ heatmap’s gains concentrate in a tighter region around layers 7-16. The combined heatmap shows three distinct hot zones:
Zone A (layers 7-15, ~19-42% depth): Strong EQ gains, moderate math
Zone B (layers 15-20, ~42-56% depth): Balanced improvement on both
Zone C (layers 21-27, ~58-75% depth): Strong math gains, EQ roughly neutral
So the model’s “emotional processing” lives slightly earlier in the stack than its “mathematical processing.” That’s a cool finding — different kinds of reasoning occupy different layer ranges even in a small model.
3. The encoding wall is a cliff, not a slope
The transition from “productive duplication” to “catastrophic failure” happens over 1-2 layers. Layer 5 duplication helps. Layer 3 duplication tanks the model. There’s basically no gradient — it’s a cliff edge. Ng observed something similar at 27B but it’s even more pronounced at 4B scale.
The Pareto Frontier
Not all improvements are worth the extra latency. Each extra layer traversal costs time. The practical question is: how much bang per buck?
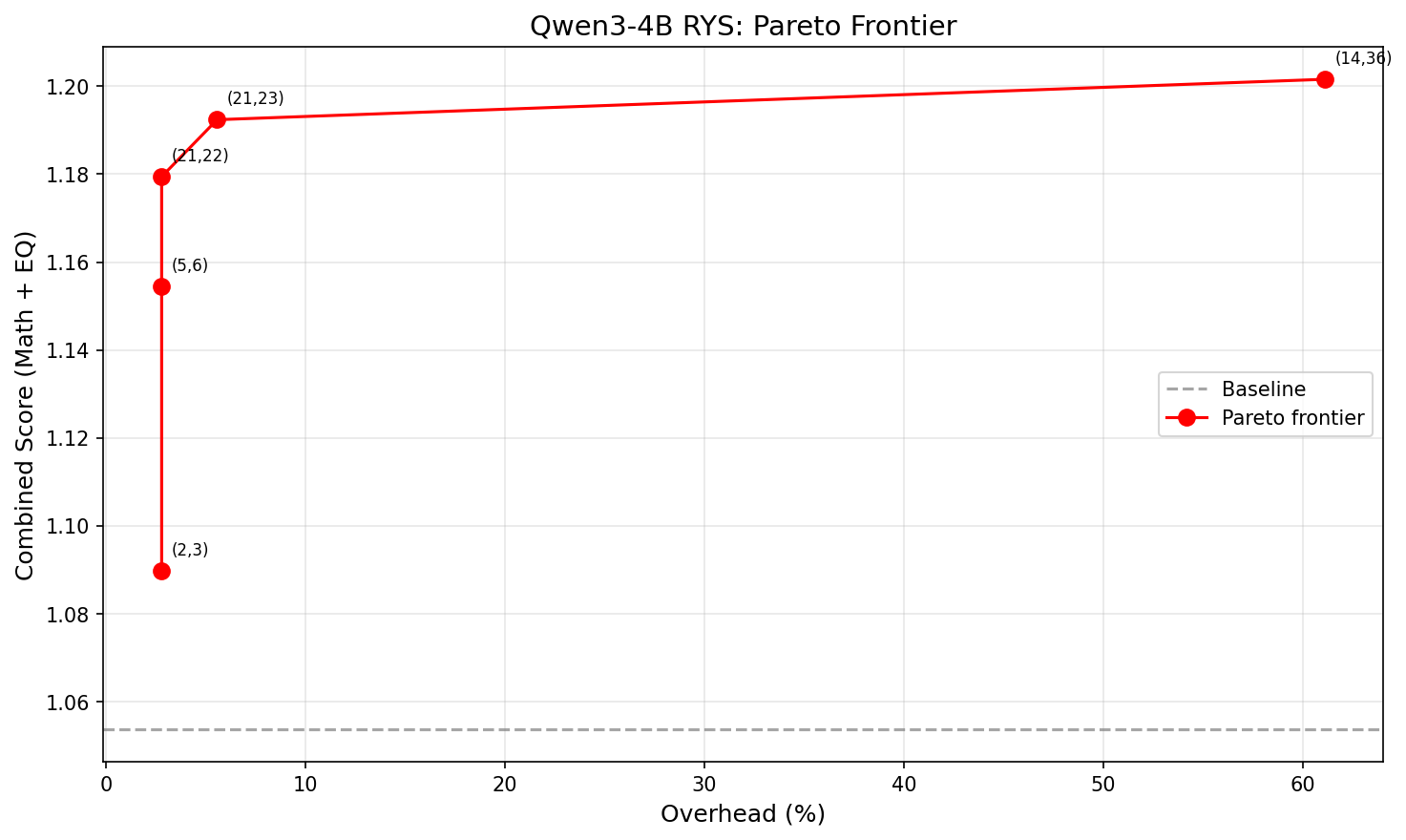
X-axis: overhead (%). Y-axis: combined score. The curve is sharply concave — almost all the benefit comes from the first 1-2 extra layers.
Size
Config (i,j)
Extra layers
Overhead
Combined
Improvement
XS
(2,3)
1
2.8%
1.090
+3.4%
S
(5,6)
1
2.8%
1.154
+9.6%
M
(21,22)
1
2.8%
1.179
+11.9%
L
(21,23)
2
5.6%
1.192
+13.2%
XL
(14,36)
22
61.1%
1.202
+14.0%
The winner is (21,22): just repeat layer 21 once. That’s +11.9% combined improvement at 2.8% latency overhead. One single extra layer forward pass. That’s it.
Going from 1 extra layer to 2 buys another 1.3 percentage points. Going from 2 extra layers to 22 — literally 10x the overhead — buys only 0.8 more. The returns collapse fast. Look at that Pareto chart — the curve is basically flat after the first couple of points.
Single-Layer Repeats: The 4B Surprise
This is where things get really interesting, and where the results diverge most from Ng’s 27B findings.
Ng reported that single-layer repeats at 27B “almost never help.” You need to duplicate a contiguous block of at least 2-3 layers to see meaningful improvement at that scale.
At 4B? 14 out of 35 single-layer repeats beat baseline. Here are the top performers:
Layer
Config
Combined delta
21
(21,22)
+0.126
5
(5,6)
+0.101
24
(24,25)
+0.100
26
(26,27)
+0.073
19
(19,20)
+0.071
22
(22,23)
+0.063
20
(20,21)
+0.057
17
(17,18)
+0.049
Layers 5 and 17-26 — nearly the entire mid-to-late stack — all produce meaningful gains when repeated individually. That’s a wide, diffuse productive zone spanning about 60% of the model.
My interpretation: smaller models have less specialized layers. At 27B with 64 layers, each layer does something specific enough that repeating just one doesn’t help much — you need a coherent block. At 4B with 36 layers, individual layers carry more general-purpose reasoning capacity. A single extra pass through one of them is already enough to bump quality.
This is arguably the most practically useful finding from the whole experiment. For small models, even the simplest possible intervention works.
How This Compares to Ng’s 27B Results
Property
Qwen3-4B (36 layers)
Qwen3.5-27B (64 layers)
Three-phase anatomy
Yes, clearly visible
Yes
Encoding wall
Layers 0-6 (~0-17%)
~first 15%
Best single-layer
(21,22) = +11.9%
Rarely productive
Best absolute
(14,36) = +14.0% at 61% overhead
~+15.6% at ~15.6% overhead
Best efficiency
(21,22) = +11.9% at 2.8% overhead
Layer 33 = +1.5%
Productive single layers
14/35 (40%)
Rare
Efficiency curve shape
Sharply concave
Roughly linear to ~10 layers
The biggest difference is the shape of the efficiency curve. At 27B, adding more repeated layers gives roughly linear improvement up to about 10 extra layers — there’s a real reason to invest in multi-layer duplication. At 4B, the curve is sharply concave. Almost all the benefit comes from the very first extra layer. After that, you’re paying a lot of overhead for very little gain.
This makes intuitive sense. A bigger model has more specialized layers where repetition compounds — each one contributes something distinct. A smaller model gets most of its benefit from a single extra pass through its most general-purpose reasoning layer, and additional passes hit diminishing returns because those layers are doing similar work.
What This Means If You Want to Use It
If you’re deploying a small dense model and want better reasoning at minimal cost:
Find the model’s “layer 21.” Run a quick single-layer sweep on your target model. It takes minutes per config.
Repeat that one layer. At 2.8% latency overhead, this is basically free.
Don’t over-invest in multi-layer duplication at small scale. The second extra layer buys way less than the first.
For framework implementers: this is a ~10-line change to a model’s forward pass. No weight changes, no retraining, no meaningful VRAM increase. It should be a first-class inference option in llama.cpp, vLLM, ExLlama, etc.
Caveats
I want to be upfront about what this doesn’t prove:
One model, one family. These results are Qwen3-4B specific. The three-phase anatomy probably generalizes (Ng showed it on multiple architectures), but the exact layer numbers won’t. Every model needs its own sweep.
Small probe sets. 16 math + 16 EQ questions. Enough for relative ordering of configs, but the absolute scores have meaningful variance. Validate on larger benchmarks before deploying.
Greedy decoding only. Sampling might interact differently with layer duplication. I haven’t tested that.
No multi-block compositions. Ng’s beam search finds configs that repeat two different blocks (e.g., layers 30-34 AND 43-45). I only tested single contiguous blocks. The multi-block space at 4B is unexplored.
RoPE positions aren’t adjusted. The model sees the same position IDs on the repeated pass. This works empirically but the theoretical interaction is unclear.
Reproducing This
Everything runs on a single 3090 (or any 24GB+ GPU):
The scanner loads the model once, pre-tokenizes all probes, then iterates through configs. Each config wraps the base model with a layer-index remapping (no weight copies, just pointer rearrangement), runs all probes greedy, scores, and saves. Resume works by checking which config keys already exist in the results JSON.
What’s Next
A few obvious follow-ups I’m thinking about:
Multi-block beam search at 4B. Does combining layers 5-6 and 21-22 compound the gains?
Cross-scale comparison. Run the same sweep on Qwen3.5-2B (hybrid attention), Qwen3.5-9B, maybe a non-Qwen model. See how the efficiency curve changes with scale.
Train-time loop exposure. Train a small model where specific layers are looped during training, compare with inference-time-only duplication.
Integration with inference frameworks. llama.cpp, vLLM, and ExLlama already manage layer weights — adding a “repeat layer N” flag should be pretty straightforward.
The broader takeaway is that transformer layers aren’t interchangeable. They have structure, and that structure is legible even at small scale. You can exploit it at inference time with zero retraining, and the cost is basically nothing.
Layer 21 thinks twice. The model gets smarter. That’s the whole trick.
I’ve been building SkySpottr, an AR app overlaying aircraft information on your phone’s screen, using your device’s location, orientation, and incoming aircraft data (ADS-B) to predict where planes should appear on screen, then uses a YOLO model to lock onto the actual aircraft and refine the overlay. YOLOv8 worked great for this… until I actually read the license.
Welcome to Austin’s Nerdy Things, where we train from scratch entire neural networks to avoid talking to lawyers.
The Problem with Ultralytics
YOLOvWhatver is excellent. Fast, accurate, easy to use, great documentation. But Ultralytics licenses it under AGPL-3.0, which means if you use it in a product, you either need to open-source your entire application or pay for a commercial license. For a side project AR app that I might eventually monetize? That’s a hard pass.
Enter YOLOX from Megvii (recommended by either ChatGPT or Claude, can’t remember which, as an alternative). MIT licensed. Do whatever you want with it. The catch? You have to train your own models from scratch instead of using Ultralytics’ pretrained weights and easy fine-tuning pipeline. I have since learned there are some pretrained models. I didn’t use them.
So training from scratch is what I did. Over a few late nights in December 2025, I went from zero YOLOX experience to running custom-trained aircraft detection models in my iOS app. Here’s how it went.
The Setup
Hardware: RTX 3090 on my Windows machine, COCO2017 dataset on network storage (which turned out to be totally fine for training speed), and way too many terminal windows open.
I started with the official YOLOX repo and the aircraft class from COCO2017. The dataset has about 3,000 training images with airplanes, which is modest but enough to get started.
The first training run failed immediately because I forgot to install YOLOX as a package. Classic. Then it failed again because I was importing a class that didn’t exist in the version I had. Claude (who was helping me through this, and hallucinated said class) apologized and fixed the import. We got there eventually.
Training Configs: Nano, Tiny, Small, and “Nanoish”
YOLOX has a nice inheritance-based config system. You create a Python file, inherit from a base experiment class, and override what you want. I ended up with four different configs:
yolox_nano_aircraft.py – The smallest. 0.9M params, 1.6 GFLOPs. Runs on anything.
yolox_tiny_aircraft.py – Slightly bigger with larger input size for small object detection.
yolox_small_aircraft.py – 5M params, 26 GFLOPs. The “serious” model.
yolox_nanoish_aircraft.py – My attempt at something between nano and tiny.
The “nanoish” config was my own creation where I tried to find a sweet spot. I bumped the width multiplier from 0.25 to 0.33 and… immediately got a channel mismatch error because 0.33 doesn’t divide evenly into the architecture. Turns out you can’t just pick arbitrary numbers. I am a noob at these things. Lesson learned.
After some back-and-forth, I settled on a config with 0.3125 width (which is 0.25 \* 1.25, mathematically clean) and 512×512 input. This gave me roughly 1.2M params – bigger than nano, smaller than tiny, and it actually worked.
Here’s the small model config – the one that ended up in production. The key decisions are width = 0.50 (2x wider than nano for better feature extraction), 640×640 input for small object detection, and full mosaic + mixup augmentation:
class Exp(MyExp):
def __init__(self):
super(Exp, self).__init__()
# Model config - YOLOX-Small architecture
self.num_classes = 1 # Single class: airplane
self.depth = 0.33
self.width = 0.50 # 2x wider than nano for better feature extraction
# Input/output config - larger input helps small object detection
self.input_size = (640, 640)
self.test_size = (640, 640)
self.multiscale_range = 5 # Training will vary from 480-800
# Data augmentation
self.mosaic_prob = 1.0
self.mosaic_scale = (0.1, 2.0)
self.enable_mixup = True
self.mixup_prob = 1.0
self.flip_prob = 0.5
self.hsv_prob = 1.0
# Training config
self.warmup_epochs = 5
self.max_epoch = 400
self.no_aug_epochs = 100
self.basic_lr_per_img = 0.01 / 64.0
self.scheduler = "yoloxwarmcos"
def get_model(self):
from yolox.models import YOLOX, YOLOPAFPN, YOLOXHead
in_channels = [256, 512, 1024]
# Small uses standard convolutions (no depthwise)
backbone = YOLOPAFPN(self.depth, self.width, in_channels=in_channels, act=self.act)
head = YOLOXHead(self.num_classes, self.width, in_channels=in_channels, act=self.act)
self.model = YOLOX(backbone, head)
return self.model
And the nanoish config for comparison – note the depthwise=True and the width of 0.3125 (5/16) that I landed on after the channel mismatch debacle:
class Exp(MyExp):
def __init__(self):
super(Exp, self).__init__()
self.num_classes = 1
self.depth = 0.33
self.width = 0.3125 # 5/16 - halfway between nano (0.25) and tiny (0.375)
self.input_size = (512, 512)
self.test_size = (512, 512)
# Lighter augmentation than small - this model is meant to be fast
self.mosaic_prob = 0.5
self.mosaic_scale = (0.5, 1.5)
self.enable_mixup = False
def get_model(self):
from yolox.models import YOLOX, YOLOPAFPN, YOLOXHead
in_channels = [256, 512, 1024]
backbone = YOLOPAFPN(self.depth, self.width, in_channels=in_channels,
act=self.act, depthwise=True) # Depthwise = lighter
head = YOLOXHead(self.num_classes, self.width, in_channels=in_channels,
act=self.act, depthwise=True)
self.model = YOLOX(backbone, head)
return self.model
The -c yolox_s.pth loads YOLOX’s pretrained COCO weights as a starting point (transfer learning). The -d 1 is one GPU, -b 16 is batch size 16 (about 8GB VRAM on the 3090 with fp16), and --fp16 enables mixed precision training.
The Small Object Problem
Here’s the thing about aircraft detection for an AR app: planes at cruise altitude look tiny. A 747-8 at 37,000 feet is maybe 20-30 pixels on your phone screen if you’re lucky, even with the 4x optical zoom of the newest iPhones (8x for the 12MP weird zoom mode). Standard YOLO models are tuned for reasonable-sized objects, not specks in the sky. The COCO dataset has aircraft that are reasonably sized, like when you’re sitting at your gate at an airport and take a picture of the aircraft 100 ft in front of you.
My first results were underwhelming. The nano model was detecting larger aircraft okay but completely missing anything at altitude. The evaluation metrics looked like this:
AP for airplane = 0.234
AR for small objects = 0.089
Not great. The model was basically only catching aircraft on approach or takeoff.
For the small config, I made some changes to help with tiny objects:
Increased input resolution to 640×640 (more pixels = more detail for small objects)
Enabled full mosaic and mixup augmentation (helps the model see varied object scales)
Switched from depthwise to regular convolutions (more capacity)
(I’ll be honest, I was leaning heavily on Claude for the ML-specific tuning decisions here)
This pushed the model to 26 GFLOPs though, which had me worried about phone performance.
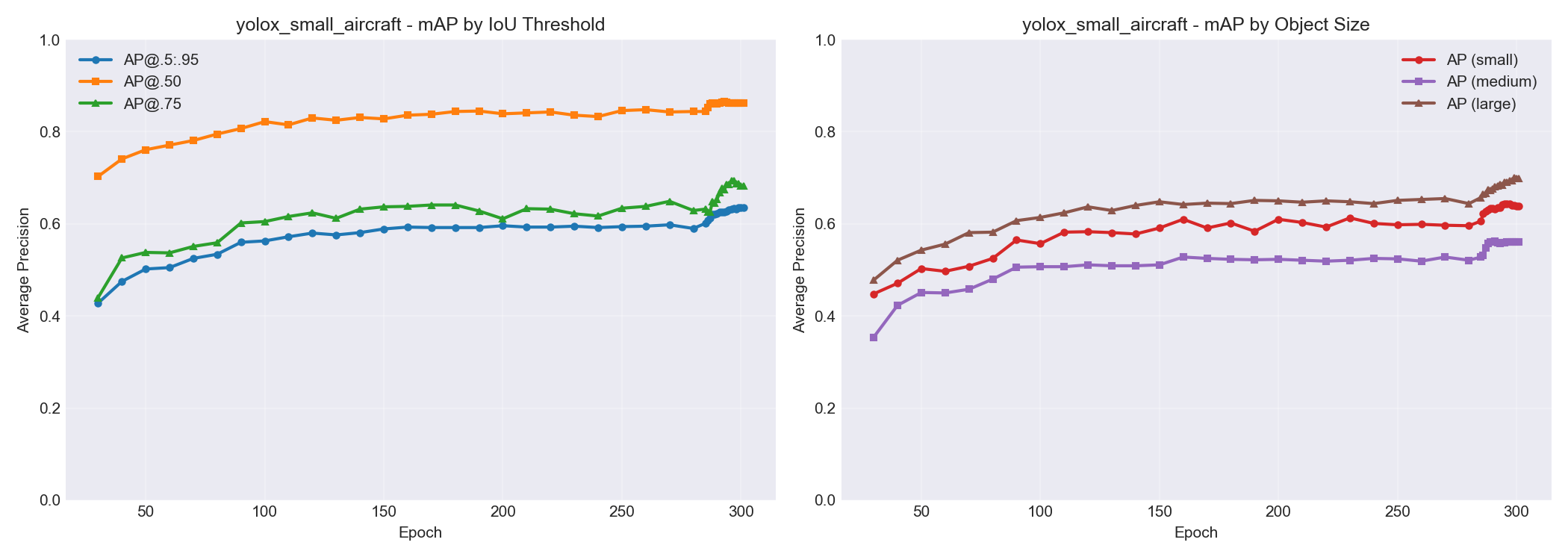
Here’s what the small model’s accuracy looked like broken down by object size. You can see AP for small objects climbing from ~0.45 to ~0.65 over training, while large objects hit ~0.70. Progress, but small objects remain the hardest category – which tracks with the whole “specks in the sky” problem.
Will This Actually Run on a Phone?
The whole point of this exercise was to run inference on an iPhone. So here is some napkin math:
Model
GFLOPs
Estimated Phone Inference
Nano
1.6
~15ms, smooth 30fps easy
Nanoish
3.2
~25ms, still good
Small
26
~80ms, might be sluggish
YOLOv8n (for reference)
8.7
~27ms
My app was already running YOLOv8n at 15fps with plenty of headroom. So theoretically even the small model should work, but nano/nanoish would leave more room for everything else the app needs to do.
The plan: train everything, compare accuracy, quantize for deployment, and see what actually works in practice.
Training Results (And a Rookie Mistake)
After letting things run overnight (300 epochs takes a while even on a 3090), here’s what I got:
The nanoish model at epoch 100 was already showing 94% detection rate on test images, beating the fully-trained nano model. And it wasn’t even done training yet.
Quick benchmark on 50 COCO test images with aircraft (RTX 3090 GPU inference – not identical to phone, but close enough for the smaller models to be representative):
Model
Detection Rate
Avg Detections/Image
Avg Inference (ms)
FPS
YOLOv8n
58.6%
0.82
33.6
29.7
YOLOX nano
74.3%
1.04
14.0
71.4
YOLOX nanoish
81.4%
1.14
15.0
66.9
YOLOX tiny
91.4%
1.28
16.5
60.7
YOLOX small
92.9%
1.30
17.4
57.4
Ground Truth
–
1.40
–
–
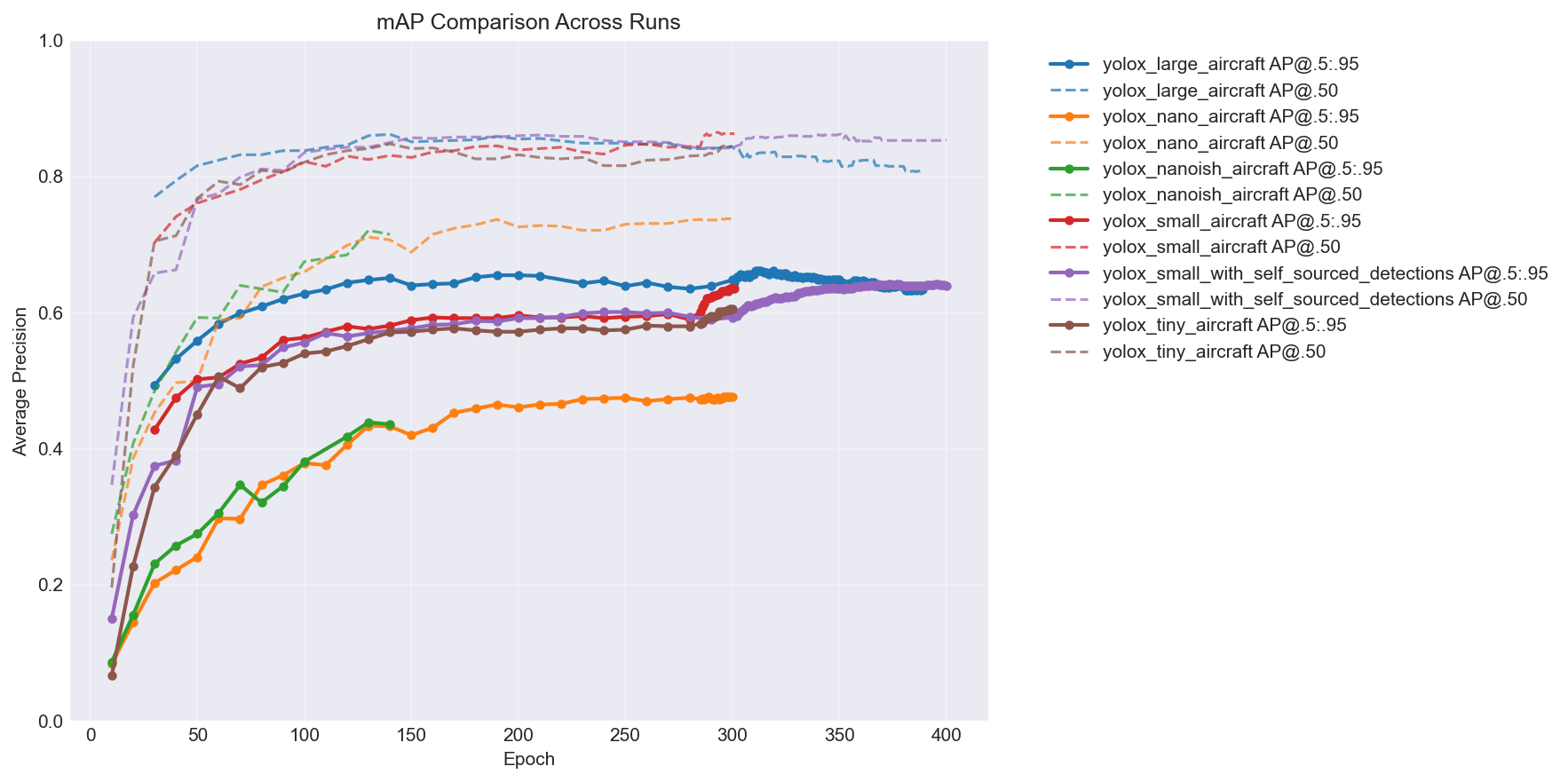
YOLOv8n getting beaten by every single YOLOX variant while also being slower was… not what I expected. Here’s the mAP comparison across all the models over training – you can see the hierarchy pretty clearly:
The big takeaway: more capacity = better accuracy, but with diminishing returns. The jump from nano to nanoish is huge, nanoish to small is solid, and tiny lands somewhere in between depending on the epoch. (You’ll notice two extra lines in the chart – a large model and a self-sourced variant. I kept training after this post’s story ends. More on the self-sourced pipeline later. You can also see the large model is clearly overfitting past epoch ~315 – loss keeps decreasing but mAP starts dropping. My first time overfitting a model.)
The nanoish model hit a nice sweet spot. Faster than YOLOv8n, better small object detection than pure nano, and still lightweight enough for mobile.
And here is the output from my plot_training.py script:
But there was a problem I didn’t notice until later: my training dataset had zero images without aircraft in them. Every single training image contained at least one airplane. This is… not ideal if you want your model to learn what an airplane isn’t. More on that shortly.
How It Actually Works in the App
Before I get to results, here’s what the ML is actually doing in SkySpottr. The app combines multiple data sources to track aircraft:
ADS-B data tells us where aircraft are in 3D space (lat, lon, altitude)
Device GPS and orientation tell us where the phone is and which way it’s pointing
Physics-based prediction places aircraft overlays on screen based on all the above
That prediction is usually pretty good, but phone sensors drift and aircraft positions are slightly delayed. So the overlays can be off by a couple degrees. This is where YOLO comes in.
The app runs the model on each camera frame looking for aircraft. When it finds one within a threshold distance of where the physics engine predicted an aircraft should be, it “snaps” the overlay to the actual detected position. The UI shows an orange circle around the aircraft and marks it as “SkySpottd” – confirmed via machine learning.
I call this “ML snap” mode. It’s the difference between “there’s probably a plane somewhere around here” and “that specific bright dot is definitely the aircraft.”
The model runs continuously on device, which is why inference time matters so much. Even at 15fps cap, that’s still 15 inference cycles per second competing with everything else the app needs to do (sensor fusion, WebSocket data, AR rendering, etc.). Early on I was seeing 130%+ CPU usage on my iPhone, which is not great for battery life. Every millisecond saved on inference is a win.
Getting YOLOX into CoreML
One thing the internet doesn’t tell you: YOLOX and Apple’s Vision framework don’t play nice together.
YOLOv8 exports to CoreML with a nice Vision-compatible interface. You hand it an image, it gives you detections. Easy. YOLOX expects different preprocessing – it wants pixel values in the 0-255 range (not normalized 0-1), and the output tensor layout is different.
The conversion pipeline goes PyTorch → TorchScript → CoreML. Here’s the core of it:
import torch
import coremltools as ct
from yolox.models import YOLOX, YOLOPAFPN, YOLOXHead
# Build model (same architecture as training config)
backbone = YOLOPAFPN(depth=0.33, width=0.50, in_channels=[256, 512, 1024], act="silu")
head = YOLOXHead(num_classes=1, width=0.50, in_channels=[256, 512, 1024], act="silu")
model = YOLOX(backbone, head)
# Load trained weights
ckpt = torch.load("yolox_small_best.pth", map_location="cpu", weights_only=False)
model.load_state_dict(ckpt["model"])
model.eval()
model.head.decode_in_inference = True # Output pixel coords, not raw logits
# Trace and convert
dummy = torch.randn(1, 3, 640, 640)
traced = torch.jit.trace(model, dummy)
mlmodel = ct.convert(
traced,
inputs=[ct.TensorType(name="images", shape=(1, 3, 640, 640))],
outputs=[ct.TensorType(name="output")],
minimum_deployment_target=ct.target.iOS15,
convert_to="mlprogram",
)
mlmodel.save("yolox_small_aircraft.mlpackage")
The decode_in_inference = True is crucial — without it, the model outputs raw logits and you’d need to implement the decode head in Swift. With it, the output is [1, N, 6] where 6 is [x_center, y_center, width, height, obj_conf, class_score] in pixel coordinates.
On the Swift side, Claude ended up writing a custom detector that bypasses the Vision framework entirely. Here’s the preprocessing — the part that was hardest to get right:
/// Convert pixel buffer to MLMultiArray [1, 3, H, W] with 0-255 range
private func preprocess(pixelBuffer: CVPixelBuffer) -> MLMultiArray? {
// GPU-accelerated resize via Core Image
let ciImage = CIImage(cvPixelBuffer: pixelBuffer)
let scaleX = CGFloat(inputSize) / ciImage.extent.width
let scaleY = CGFloat(inputSize) / ciImage.extent.height
let scaledImage = ciImage.transformed(by: CGAffineTransform(scaleX: scaleX, y: scaleY))
// Reuse pixel buffer from pool (memory leak fix #1)
var resizedBuffer: CVPixelBuffer?
CVPixelBufferPoolCreatePixelBuffer(kCFAllocatorDefault, pool, &resizedBuffer)
guard let buffer = resizedBuffer else { return nil }
ciContext.render(scaledImage, to: buffer)
// Reuse pre-allocated MLMultiArray (memory leak fix #2)
guard let array = inputArray else { return nil }
CVPixelBufferLockBaseAddress(buffer, .readOnly)
defer { CVPixelBufferUnlockBaseAddress(buffer, .readOnly) }
let bytesPerRow = CVPixelBufferGetBytesPerRow(buffer)
let pixels = CVPixelBufferGetBaseAddress(buffer)!.assumingMemoryBound(to: UInt8.self)
let arrayPtr = array.dataPointer.assumingMemoryBound(to: Float.self)
let channelStride = inputSize * inputSize
// BGRA → RGB, keep 0-255 range (YOLOX expects unnormalized pixels)
// Direct pointer access is ~100x faster than MLMultiArray subscript
for y in 0..<inputSize {
let rowOffset = y * bytesPerRow
let yOffset = y * inputSize
for x in 0..<inputSize {
let px = rowOffset + x * 4
let idx = yOffset + x
arrayPtr[idx] = Float(pixels[px + 2]) // R
arrayPtr[channelStride + idx] = Float(pixels[px + 1]) // G
arrayPtr[2 * channelStride + idx] = Float(pixels[px]) // B
}
}
return array
}
The two key gotchas: (1) BGRA byte order from the camera vs RGB that the model expects, and (2) YOLOX wants raw 0-255 pixel values, not the 0-1 normalized range that most CoreML models expect. If you normalize, everything silently breaks — the model runs, returns garbage, and you spend an evening wondering why.
For deployment, I used CoreML’s INT8 quantization (coremltools.optimize.coreml.linear_quantize_weights). This shrinks the model by about 50% with minimal accuracy loss. The small model went from ~17MB to 8.7MB, and inference time improved slightly.
Real World Results (Round 1)
I exported the nanoish model and got it running in SkySpottr. The good news: it works. The ML snap feature locks onto aircraft, the orange verification circles appear, and inference is fast enough that I don’t notice any lag.
The less good news: false positives. Trees, parts of houses, certain cloud formations – the model occasionally thinks these are aircraft. Remember that rookie mistake about no negative samples? Yeah.
I later set up a 3-way comparison to visualize exactly this kind of failure. The three panels show my COCO-only trained model (red boxes), a later model trained on self-sourced images (green boxes – I’ll explain this pipeline shortly), and YOLO26-X as a ground truth oracle (right panel, no boxes means no detection). The COCO-only model confidently detects an “aircraft” that is… a building. The other two correctly ignore it.
The app handles this gracefully because of the matching threshold. Random false positives in empty sky don’t trigger the snap because there’s no predicted aircraft nearby to match against. But when there’s a tree branch right next to where a plane should be, the model sometimes locks onto the wrong thing.
The even less good news: it still struggles with truly distant aircraft. A plane at 35,000 feet that’s 50+ miles away is basically a single bright pixel. No amount of ML is going to reliably detect that. For those, the app falls back on pure ADS-B prediction, which is usually good enough to get the overlay in the right general area.
But when it works, it works. I’ll show some examples of successful detections in the self-sourced section below.
The Memory Leak Discovery (Fun Debugging Tangent)
While testing the YOLOX integration, I was also trying to get RevenueCat working for subscriptions. Had the app running for about 20 minutes while I debugged the in-app purchase flow. Noticed it was getting sluggish, opened Instruments, and… yikes.
Base memory for the app is around 200MB. After 20 minutes of continuous use, it had climbed to 450MB. Classic memory leak pattern.
The culprit was AI induced, and AI resolved: it was creating a new CVPixelBuffer and MLMultiArray for every single frame. At 15fps, that’s 900 allocations per minute that weren’t getting cleaned up fast enough.
The fix was straightforward – use a CVPixelBufferPool for the resize buffers and pre-allocate a single MLMultiArray that gets reused. Memory now stays flat even after hours of use.
(The RevenueCat thing? I ended up ditching it entirely and going with native StoreKit2. RevenueCat is great, but keeping debug and release builds separate was more hassle than it was worth for a side project. StoreKit2 is actually pretty nice these days if you don’t need the analytics. I’m at ~80 downloads, and not a single purchase. First paid app still needs some fine tuning, clearly, on the whole freemium thing.)
Round 2: Retraining with Negative Samples
After discovering the false positive issue, I went back and retrained. This time I made sure to include images without aircraft – random sky photos, clouds, trees, buildings, just random COCO2017 stuff. The model needs to learn what’s NOT an airplane just as much as what IS one.
Here’s the extraction script that handles the negative sampling. The key insight: you need to explicitly tell the model what empty sky looks like:
def extract_airplane_dataset(split="train", negative_ratio=0.2, seed=42):
"""Extract airplane images from COCO, with negative samples."""
with open(f"instances_{split}2017.json") as f:
coco_data = json.load(f)
# Find all images WITH airplanes
airplane_image_ids = set()
for ann in coco_data['annotations']:
if ann['category_id'] == AIRPLANE_CATEGORY_ID: # 5 in COCO
airplane_image_ids.add(ann['image_id'])
# Find images WITHOUT airplanes for negative sampling
all_ids = {img['id'] for img in coco_data['images']}
negative_ids = all_ids - airplane_image_ids
# Add 20% negative images (no airplanes = teach model what ISN'T a plane)
num_negatives = int(len(airplane_image_ids) * negative_ratio)
sampled_negatives = random.sample(list(negative_ids), num_negatives)
# ... copy images and annotations to output directory
I also switched from nanoish to the small model. The accuracy improvement on distant aircraft was worth the extra compute, and with INT8 quantization the inference time came in at around 5.6ms on an iPhone – way better than my napkin math predicted. Apple’s Neural Engine is impressive.
The final production model: YOLOX-Small, 640×640 input, INT8 quantized, ~8.7MB on disk. It runs at 15fps with plenty of headroom for the rest of the app on my iPhone 17 Pro.
Round 3: Self-Sourced Images and Closing the Loop
So the model works, but it was trained entirely on COCO2017 – airport tarmac photos, stock images, that kind of thing. My app is pointing at the sky from the ground. Those are very different domains.
I added a debug flag to SkySpottr for my phone that saves every camera frame where the model fires a detection. Just flip it on, walk around outside for a while, and the app quietly collects real-world training data. Over a few weeks of casual use, I accumulated about 2,000 images from my phone.
The problem: these images don’t have ground truth labels. I’m not going to sit there and manually draw bounding boxes on 2,000 sky photos. So I used YOLO26-X (Ultralytics’ latest and greatest, which I’m fine using as an offline tool since it never ships in the app) as a teacher model. Run it on all the collected images, take its high-confidence detections as pseudo-labels, convert to COCO annotation format, and now I have a self-sourced dataset to mix in with the original COCO training data.
Here’s the pseudo-labeling pipeline. First, run the teacher model on all collected images:
from ultralytics import YOLO
model = YOLO("yolo26x.pt") # Big model, accuracy over speed
for img_path in tqdm(image_paths, desc="Processing images"):
results = model(str(img_path), conf=0.5, verbose=False)
boxes = results[0].boxes
airplane_boxes = boxes[boxes.cls == AIRPLANE_CLASS_ID]
for box in airplane_boxes:
xyxy = box.xyxy[0].cpu().numpy().tolist()
x1, y1, x2, y2 = xyxy
detections.append({
"bbox_xywh": [x1, y1, x2 - x1, y2 - y1], # COCO format
"confidence": float(box.conf[0]),
})
Then convert those detections to COCO annotation format so YOLOX can train on them:
def convert_to_coco(detections):
"""Convert YOLO26 detections to COCO training format."""
coco_data = {
"images": [], "annotations": [],
"categories": [{"id": 1, "name": "airplane", "supercategory": "vehicle"}],
}
for uuid, data in detections.items():
img_path = Path(data["image_path"])
width, height = Image.open(img_path).size
if width > 1024 or height > 1024: # Skip oversized images
continue
coco_data["images"].append({"id": image_id, "file_name": f"{uuid}.jpg",
"width": width, "height": height})
for det in data["detections"]:
coco_data["annotations"].append({
"id": ann_id, "image_id": image_id, "category_id": 1,
"bbox": det["bbox_xywh"], "area": det["bbox_xywh"][2] * det["bbox_xywh"][3],
"iscrowd": 0,
})
with open("instances_train.json", "w") as f:
json.dump(coco_data, f)
Finally, combine both datasets in the training config using YOLOX’s ConcatDataset:
Out of 2,000 images, YOLO26-X found aircraft in about 108 of them at a 0.5 confidence threshold – a 1.8% hit rate, which makes sense since most frames are just empty sky between detections. I filtered out anything over 1024px and ended up with a nice supplementary dataset of aircraft-from-the-ground images.
The 3-way comparison images I showed earlier came from this pipeline. Here’s what successful detections look like – the COCO-only model (red), self-sourced model (green), and YOLO26-X (right panel, shown at full resolution so you can see what we’re actually detecting):
That’s maybe 30 pixels of airplane against blue sky, detected with 0.88 and 0.92 confidence by the two YOLOX variants.
And here’s one I particularly like – aircraft spotted through pine tree branches. Real-world conditions, not a clean test image. Both YOLOX models nail it, YOLO26-X misses at this confidence threshold:
And a recent one from February 12, 2026 – a pair of what appear to be F/A-18s over Denver at 4:22 PM MST, captured at 12x zoom. The model picks up both jets at 73-75% confidence, plus the bird in the bottom-right at 77% (a false positive the app filters out via ADS-B matching). Not bad for specks against an overcast sky.
I also trained a full YOLOX-Large model (depth 1.0, width 1.0, 1024×1024 input) on the combined dataset, just to see how far I could push it. Too heavy for phone deployment, but useful for understanding the accuracy ceiling.
Conclusion
Was this worth it to avoid Ultralytics’ licensing? Since it took an afternoon and a couple evenings of vibe-coding, yes, it was not hard to switch. Not just because MIT is cleaner than AGPL, but because I learned a ton about how these models actually work. The Ultralytics ecosystem is so polished that it’s easy to treat it as a black box. Building from YOLOX forced me to understand some of the nuances, the training configs, and the tradeoffs between model size and accuracy.
Plus, I can now say I trained my own object detection model from scratch. That’s worth something at parties. Nerdy parties, anyway.
SkySpottr is live on the App Store if you want to see the model in action – point your phone at the sky and watch it lock onto aircraft in real-time.
The self-sourced pipeline is still running. Every time I use the app with the debug flag on, it collects more training data. The plan is to periodically retrain as the dataset grows – especially now that I’m getting images from different weather conditions, times of day, and altitudes. The COCO-only model was a solid start, but a model trained on actual ground-looking-up images of aircraft at altitude? That’s the endgame.
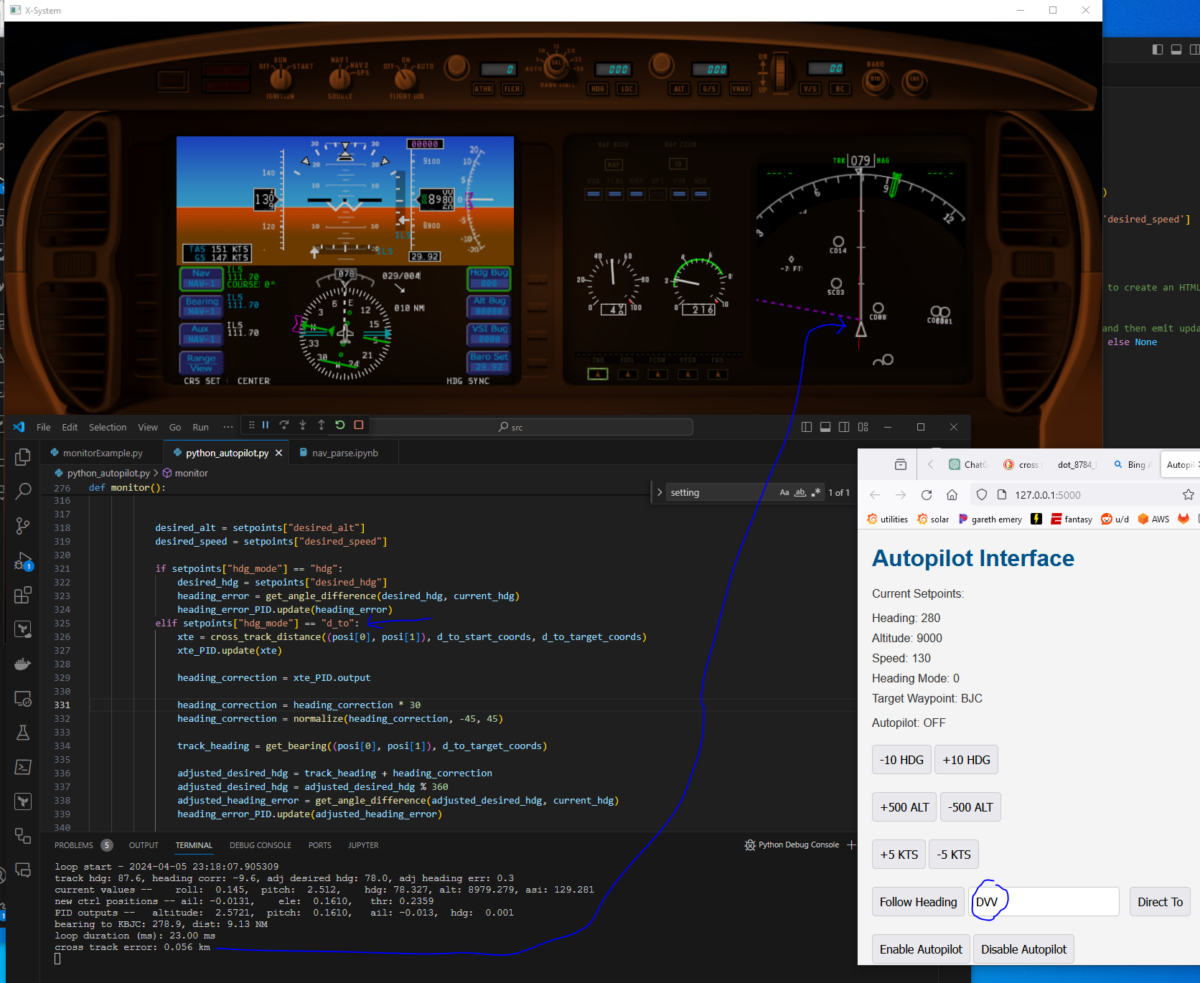
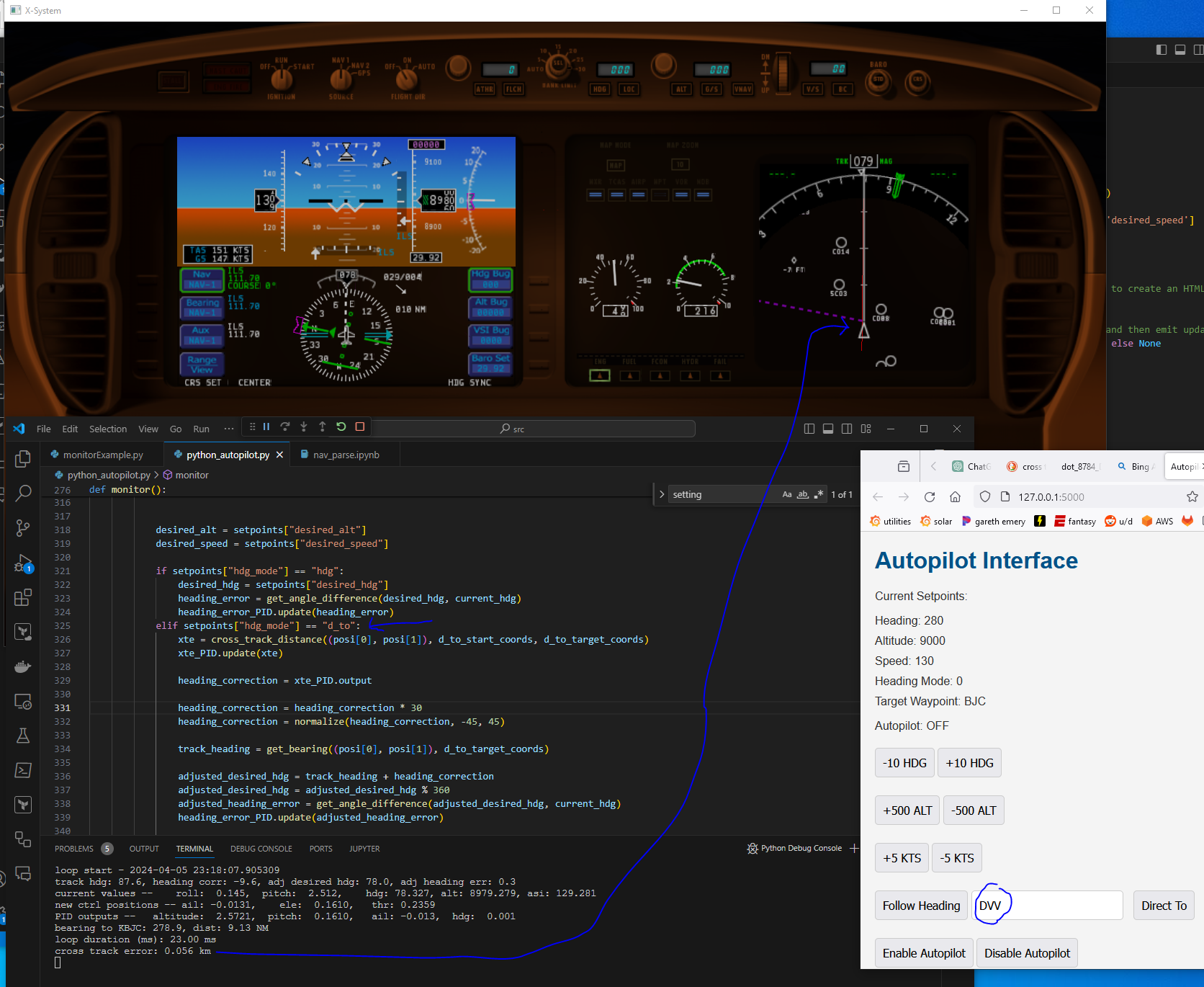
screenshot showing python autopilot code controlling xplane, flying aircraft along a track
Continuing from the last post (Adding some polish to the X-Plane Python Autopilot with Flask, Redis, and WebSockets), I have a bit of momentum going on the Python X-Plane Autopilot stuff. There were a couple of items I wanted to complete before declaring the project “done”. The first is a “takeoff” button, which isn’t yet done. The other is the ability to fly along a track. That is now complete as of last night.
It is one thing to fly a bearing from A to B. That works fine as long as there is no wind in any direction. Flying a heading set by bearing is easy, and is part of the heading select & hold feature built out in a previous iteration of the code. To do so requires a “desired heading” and a heading error PID. The goal is to minimize the heading error, so we set the setpoint to 0. This controls a “roll” PID controller, which controls an aileron PID controller.
Each have limits in place to prevent excessive movement. For example, the roll PID controller is limited to +/- 30 degrees. Pitch is +/- 15 degrees.
To take this to the next step requires a few things:
A “track”, which is commonly defined as a start point and an end point. Both are simply lat/lon coordinate sets.
A current location, which is current lat/lon
A cross track distance (error), which is the distance the current location is off the track.
More PID loops, namely a cross track distance PID control, which, like the heading error PID, has a setpoint of 0 (i.e. the goal is to minimize the cross track distance).
Additionally, to make something actually useful, we need a “database” of navigation points. I parsed the fixed-width delimited text files of X-Plane for this, which was not fun.
To tie it all together, the web interface needs a way to type in a nav point, and a Direct To (D->To) button. Direct to is common in aviation GPS units to set a track from the location when the button is pushed to some point (VOR, fix, airport, etc). I’ve emulated that functionality.
Here’s the screenshot showing the example aircraft navigating to DVV, which is the KDEN VOR, from somewhere near KBJC. It shows a cross track error of 0.056 km, or 56 meters. ChatGPT helpfully generated the cross track error function with a resultant number in meters. I am comfortable with many kinds of units so I’ll leave this for now. The red line on the right map view is the aircraft’s interpretation of the direct to set at the same time as I clicked my autopilot’s Direct To button. There is a 4 kt wind coming from 029. I tested with greater, somewhat constant crosswinds in the 40-50 kt range with gusts of +/- 5 kts.
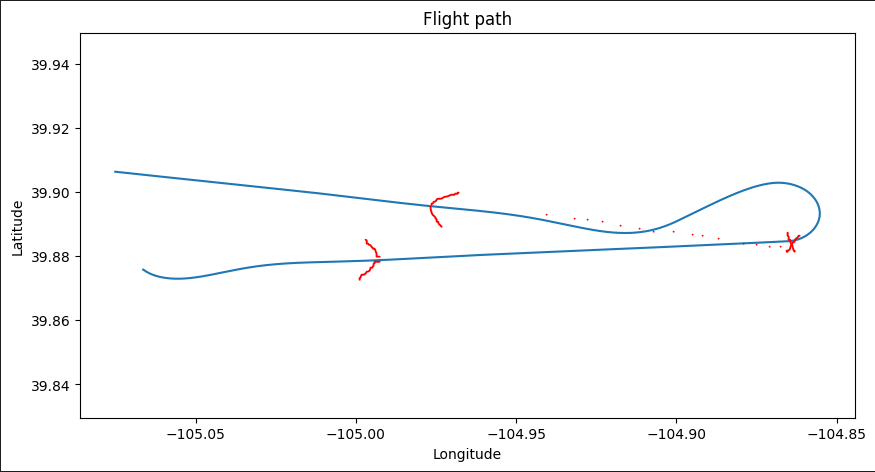
The cross track error settles down to < 10 m after a minute or so. It is a little “lazy”. If it is on a track that is due east, and I flip the track to due west, it’ll dutifully do the 180, then attempt to rejoin the track but it overshoots a bit and settles down after ~1 oscillation. I could probably turn up the P on the xte PID and that would help. Below is a track of tacking off from KBJC and the doing direct to DVV. The X is where I clicked Direct to back to the BJC VOR, it turned left and rejoined the track, overshooting, then settling back in nicely.
The Python Autopilot Code
I’m not going to pretend I wrote the cross track distance code, nor will I pretend to understand it. It works. The sign of the result depends on something along the lines of which side of the great circle line you are on. Luckily, aircraft (and boats and other things that follow tracks) don’t typically go from B to A. They go from A to B so this is consistent no matter which direction the track is facing. If they do need to go back to the start, the start becomes the end, if that makes sense.
This is the glorious cross track distance code along with some test code. Using Google Earth, the distance from the KBJC control tower to the centerline of 30R/12L should be ~0.44 km.
def cross_track_distance(point, start, end):
# Convert all latitudes and longitudes from degrees to radians
point_lat, point_lon = math.radians(point[0]), math.radians(point[1])
start_lat, start_lon = math.radians(start[0]), math.radians(start[1])
end_lat, end_lon = math.radians(end[0]), math.radians(end[1])
# Calculate the angular distance from start to point
# Ensure the argument is within the domain of acos
acos_argument = math.sin(start_lat) * math.sin(point_lat) + math.cos(start_lat) * math.cos(point_lat) * math.cos(point_lon - start_lon)
acos_argument = max(-1, min(1, acos_argument)) # Clamp the argument between -1 and 1
delta_sigma = math.acos(acos_argument)
# Calculate the bearing from start to point and start to end
theta_point = math.atan2(math.sin(point_lon - start_lon) * math.cos(point_lat),
math.cos(start_lat) * math.sin(point_lat) - math.sin(start_lat) * math.cos(point_lat) * math.cos(point_lon - start_lon))
theta_end = math.atan2(math.sin(end_lon - start_lon) * math.cos(end_lat),
math.cos(start_lat) * math.sin(end_lat) - math.sin(start_lat) * math.cos(end_lat) * math.cos(end_lon - start_lon))
# Calculate the cross track distance
cross_track_dist = math.asin(math.sin(delta_sigma) * math.sin(theta_point - theta_end))
# Convert cross track distance to kilometers by multiplying by the Earth's radius (6371 km)
cross_track_dist = cross_track_dist * 6371
return cross_track_dist
kbjc_runways = {
"30R/12L": {
"Runway 12L": {
"Latitude": 39.91529286666667,
"Longitude": -105.12841313333334
},
"Runway 30R": {
"Latitude": 39.901373883333335,
"Longitude": -105.10191808333333
}
}
}
kbjc_runway_30R_start = (kbjc_runways["30R/12L"]["Runway 30R"]["Latitude"], kbjc_runways["30R/12L"]["Runway 30R"]["Longitude"])
kbjc_runway_30R_end = (kbjc_runways["30R/12L"]["Runway 12L"]["Latitude"], kbjc_runways["30R/12L"]["Runway 12L"]["Longitude"])
kbjc_tower = (test_locations["kbjc_tower"]["lat"], test_locations["kbjc_tower"]["lon"])
def test_cross_track_distance():
print(f"start lat: {kbjc_runway_30R_start[0]}, start lon: {kbjc_runway_30R_start[1]}")
print(f"end lat: {kbjc_runway_30R_end[0]}, end lon: {kbjc_runway_30R_end[1]}")
print(f"tower lat: {kbjc_tower[0]}, tower lon: {kbjc_tower[1]}")
dist = cross_track_distance(kbjc_tower, kbjc_runway_30R_start, kbjc_runway_30R_end)
print(f"cross track distance: {dist}")
test_cross_track_distance()
And the rest of the magic happens in this block. If you recall from the last post (Adding some polish to the X-Plane Python Autopilot with Flask, Redis, and WebSockets), I am using Redis as a store to hold the setpoints from the web app controlling the autopilot. It is fast enough that I don’t need to worry about latency when running at 10 Hz (the loop durations are consistently less than 30 milliseconds, with the bulk of that time being used to get and set data from X-Plane itself).
# get the setpoints from redis
setpoints = get_setpoints_from_redis()
# check if we have just changed to direct-to mode and if so, update the direct to coords. same if the target waypoint has changed
if (setpoints["hdg_mode"] == "d_to" and previous_nav_mode != "d_to") or (setpoints["target_wpt"] != previous_nav_target):
print("reason for entering this block")
print(f"previous nav mode: {previous_nav_mode}, setpoints hdg mode: {setpoints['hdg_mode']}, previous nav target: {previous_nav_target}, setpoints target wpt: {setpoints['target_wpt']}")
# d_to_start_coords is the current position, in lat,lon tuple
d_to_start_coords = (posi[0], posi[1])
# this function does a lookup in the nav_points dataframe to get the lat, lon of the target waypoint
# it could certainly be optimized to use something faster than a pandas dataframe
d_to_target_coords = get_nav_point_lat_lon(setpoints["target_wpt"])
# reset xte PID
xte_PID.clear()
print(f"setting d_to_start_coords to {d_to_start_coords}")
# these are unchanged
desired_alt = setpoints["desired_alt"]
desired_speed = setpoints["desired_speed"]
if setpoints["hdg_mode"] == "hdg":
# if we're in heading mode, just use the desired heading. this is mostly unchanged from the previous iteration
desired_hdg = setpoints["desired_hdg"]
heading_error = get_angle_difference(desired_hdg, current_hdg)
heading_error_PID.update(heading_error)
elif setpoints["hdg_mode"] == "d_to":
# if we're in direct-to mode, calculate the cross-track error and update the xte_PID.
# I am using xte to mean cross-track error/distance
xte = cross_track_distance((posi[0], posi[1]), d_to_start_coords, d_to_target_coords)
xte_PID.update(xte)
# calculate the heading correction based on the xte_PID output
heading_correction = xte_PID.output
# this is essentially saying for 1 km of cross-track error, we want to correct by 30 degrees
heading_correction = heading_correction * 30
# limit the heading correction to -45 to 45 degrees
heading_correction = normalize(heading_correction, -45, 45)
# calculate the track heading to the target waypoint. the track heading is the heading we would
# need to fly to get to the target waypoint from the current position. it is used as an initial heading
track_heading = get_bearing((posi[0], posi[1]), d_to_target_coords)
# adjust the desired heading by the heading correction
adjusted_desired_hdg = track_heading + heading_correction
# make sure the adjusted desired heading is between 0 and 360
adjusted_desired_hdg = adjusted_desired_hdg % 360
# calculate the heading error based on the adjusted desired heading, this is no different than the hdg mode
adjusted_heading_error = get_angle_difference(adjusted_desired_hdg, current_hdg)
heading_error_PID.update(adjusted_heading_error)
# log the current values
print(f"track hdg: {track_heading:.1f}, heading corr: {heading_correction:.1f}, adj desired hdg: {adjusted_desired_hdg:.1f}, adj heading err: {adjusted_heading_error:.1f}")
# write to a log file so we can make nice plots for the blog post
log_line = f"{datetime.now().strftime('%Y-%m-%d %H:%M:%S.%f')[:-3]},{posi[0]},{posi[1]},{posi[2]},{xte},{xte_PID.output},{track_heading},{heading_correction},{adjusted_desired_hdg},{adjusted_heading_error}"
with open(current_run_log_filename, "a") as log_file:
log_file.write(log_line + "\n")
Getting nav data from X-Plane data files
If you looked at the code closely, you will see the d_to_target_coords is set via a function called get_nav_point_lat_lon(nav_point). This looks up lat/lon in a file that was generated by parsing the X-Plane navigation data. In my previous job, I dealt with fixed width data formats. It is not fun. I originally tried to split based on spaces, but some of the nav point names have more than one space in them. I suppose I could just ignore the name but this is already written. This code parses the earth_nav.dat file, specifically for type 3, which is VOR/DME-like.
import pandas as pd
nav_filepath = r"C:\Users\Austin\Desktop\X-Plane 10\Resources\default data\earth_nav.dat"
raw_file_data = open(nav_filepath, 'r').readlines()
# remove first 3 lines
raw_file_data = raw_file_data[3:]
# remove last line
raw_file_data = raw_file_data[:-1]
# remove new line characters
raw_file_data = [line.replace('\n', '') for line in raw_file_data]
# Adjusting the function based on the new column map provided
def parse_nav_info(line):
column_map = {
'type': {'start': 0, 'end': 1},
'lat_sign': {'start': 2, 'end': 3},
'latitude': {'start': 3, 'end': 15},
'lon_sign': {'start': 15, 'end': 16},
'longitude': {'start': 16, 'end': 28},
'elevation': {'start': 29, 'end': 35},
'frequency': {'start': 36, 'end': 41},
'range': {'start': 42, 'end': 45},
'unknown': {'start': 46, 'end': 52},
'identifier': {'start': 53, 'end': 56},
'name': {'start': 56} # Assuming end is not needed; take till the end of the line
}
nav_info = {}
for column, column_info in column_map.items():
start = column_info['start']
end = column_info.get('end', None)
value = line[start:end].strip()
# print(f"attempting to parse {column} with value {value}")
if column == 'latitude':
lat_sign = line[column_map['lat_sign']['start']:column_map['lat_sign']['end']]
lat_sign = -1 if lat_sign == '-' else 1
value = lat_sign * float(value)
elif column == 'longitude':
lon_sign = line[column_map['lon_sign']['start']:column_map['lon_sign']['end']]
lon_sign = -1 if lon_sign == '-' else 1
value = lon_sign * float(value)
elif column == 'elevation':
value = int(value)
elif column == 'frequency':
value = int(value)
elif column == 'range':
value = int(value)
nav_info[column] = value
return nav_info
i = 0
data = []
types = []
for line in raw_file_data:
line_type = int(line[0:2])
if line_type != 3:
continue
line_data = parse_nav_info(line)
data.append(line_data)
df = pd.DataFrame(data)
columns_of_interest = ['identifier','latitude','longitude','elevation', 'frequency', 'range', 'name']
df = df[columns_of_interest]
df.head()
df.to_pickle('nav_data.pkl')
The code to read the file and import is at the beginning of the python_autopilot.py file and is fairly straightforward:
# nav_data.pkl is a pandas dataframe. yes, this should use a dict or something faster.
nav_points = pickle.load(open("nav_data.pkl", "rb"))
def get_nav_point_lat_lon(id):
nav_point = nav_points[nav_points["identifier"] == id]
return nav_point["latitude"].values[0], nav_point["longitude"].values[0]
And for the Flask side of the house, we have index.html:
<!DOCTYPE html>
<html>
<head>
<title>Autopilot Interface</title>
<script src="https://cdnjs.cloudflare.com/ajax/libs/socket.io/4.0.1/socket.io.js"></script>
<script type="text/javascript" charset="utf-8">
var socket; // Declare socket globally
// Define adjustSetpoint globally
function adjustSetpoint(label, adjustment) {
socket.emit('adjust_setpoint', {label: label, adjustment: adjustment});
}
function submitDirectTo() {
const stationId = document.getElementById('target_wpt_input').value; // Grab the value from the input
if (stationId) { // Check if the stationId is not empty
adjustSetpoint('target_wpt', stationId); // Adjust the setpoint with the stationId as the value
adjustSetpoint('hdg_mode', "d_to"); // Your existing function call
} else {
alert("Please enter a station ID.");
}
}
document.addEventListener('DOMContentLoaded', () => {
socket = io.connect(location.protocol + '//' + document.domain + ':' + location.port);
socket.on('connect', () => {
console.log("Connected to WebSocket server.");
});
// Listen for update_setpoints event to initialize the UI with Redis values
socket.on('update_setpoints', function(setpoints) {
for (const [label, value] of Object.entries(setpoints)) {
const element = document.getElementById(label);
if (element) {
element.innerHTML = value;
}
}
});
// Listen for update_setpoint events from the server
socket.on('update_setpoint', data => {
// Assuming 'data' is an object like {label: new_value}
for (const [label, value] of Object.entries(data)) {
// Update the displayed value on the webpage
const element = document.getElementById(label);
if (element) {
element.innerHTML = value;
}
}
});
});
</script>
<style>
body {
font-family: Arial, sans-serif;
margin: 20px;
background-color: #f4f4f4;
color: #333;
}
h1 {
color: #005288;
}
ul {
list-style-type: none;
padding: 0;
}
ul li {
margin: 10px 0;
}
button, input[type="text"] {
padding: 10px;
margin-top: 5px;
border: 1px solid #ccc;
border-radius: 5px;
cursor: pointer;
font-size: 16px;
}
button:hover {
background-color: #ddd;
}
.button-group {
margin-bottom: 20px;
}
#target_wpt_input {
margin-right: 10px;
}
</style>
</head>
<body>
<h1>Autopilot Interface</h1>
<p>Current Setpoints:</p>
<ul>
<li>Heading: <span id="desired_hdg">0</span></li>
<li>Altitude: <span id="desired_alt">0</span></li>
<li>Speed: <span id="desired_speed">0</span></li>
<li>Heading Mode: <span id="hdg_mode">0</span></li>
<li>Target Waypoint: <span id="target_wpt">BJC</span></li>
</ul>
<p>Autopilot: <span id="autopilot_enabled">OFF</span></p>
<!-- Example buttons for adjusting setpoints -->
<div class="button-group">
<button onclick="adjustSetpoint('desired_hdg', -10)">-10 HDG</button>
<button onclick="adjustSetpoint('desired_hdg', 10)">+10 HDG</button>
</div>
<div class="button-group">
<button onclick="adjustSetpoint('desired_alt', 500)">+500 ALT</button>
<button onclick="adjustSetpoint('desired_alt', -500)">-500 ALT</button>
</div>
<div class="button-group">
<button onclick="adjustSetpoint('desired_speed', 5)">+5 KTS</button>
<button onclick="adjustSetpoint('desired_speed', -5)">-5 KTS</button>
</div>
<div class="button-group">
<button onclick="adjustSetpoint('hdg_mode', 'hdg')">Follow Heading</button>
<input type="text" id="target_wpt_input" value="BJC">
<button onclick="submitDirectTo()">Direct To</button>
</div>
<div class="button-group">
<button onclick="adjustSetpoint('autopilot_enabled', 1)">Enable Autopilot</button>
<button onclick="adjustSetpoint('autopilot_enabled', 0)">Disable Autopilot</button>
</div>
</body>
</html>
And the Flask app itself. I still think WebSockets are magic.
from flask import Flask, render_template
from flask_socketio import SocketIO, emit
import redis
app = Flask(__name__)
socketio = SocketIO(app)
r = redis.StrictRedis(host='localhost', port=6379, db=0)
setpoints_of_interest = ['desired_hdg', 'desired_alt', 'desired_speed']
# get initial setpoints from Redis, send to clients
@app.route('/')
def index():
return render_template('index.html') # You'll need to create an HTML template
def update_setpoint(label, adjustment):
# This function can be adapted to update setpoints and then emit updates via WebSocket
current_raw_value = r.get(label) if r.exists(label) else None
if current_raw_value is not None:
try:
current_value = float(current_raw_value)
except ValueError:
current_value = current_raw_value
if label == 'desired_hdg':
new_value = (current_value + adjustment) % 360
elif label == 'autopilot_enabled':
new_value = adjustment
elif label == 'hdg_mode':
new_value = adjustment
elif label == 'target_wpt':
new_value = adjustment
else:
new_value = current_value + adjustment
r.set(label, new_value)
# socketio.emit('update_setpoint', {label: new_value}) # Emit update to clients
return new_value
@socketio.on('adjust_setpoint')
def handle_adjust_setpoint(json):
label = json['label']
adjustment = json['adjustment']
# Your logic to adjust the setpoint in Redis and calculate new_value
new_value = update_setpoint(label, adjustment)
# Emit updated setpoint to all clients
emit('update_setpoint', {label: new_value}, broadcast=True)
@socketio.on('connect')
def handle_connect():
# Fetch initial setpoints from Redis
initial_setpoints = {label: float(r.get(label)) if r.exists(label) else 0.0 for label in setpoints_of_interest}
# Emit the initial setpoints to the connected client
emit('update_setpoints', initial_setpoints)
if __name__ == '__main__':
socketio.run(app)
And here’s the full code of the autopilot itself. This will be transferred to GitHub for the next post. It is a bit long and needs to be split out into a number of separate files.
With a cross track distance known, it isn’t terribly difficult to convert that distance (error) into a heading adjustment. We now have a functioning autopilot that can control our aircraft to any VOR-like point. I could extend the X-Plane nav data parsing to read all points, but I’ll leave that as an exercise for the reader. The X-Plane Python Autopilot is almost complete – all that I have left on the checklist is a “takeoff” button. Hope you enjoyed the post!
I revisited my Python X-Plane autopilot a few weeks ago because it was pretty clunky for how to adjust setpoints and such. The job I started 1.5 years ago is exclusively Python, so I wanted to redo a bit.
Quick aside: For the new PC I just built – Ryzen 9 7900x, 2x32GB 6000 MHz, etc, X-Plane 10 was the 2nd “game” I installed on it. The first was Factorio (I followed Nilaus’ megabase in a book and have got to 5k SPM). Haven’t tried the newer sims yet, but I think they’ll still be somewhat limited by my RTX 2080 Super.
Well imagine my surprise when I woke up to 6x the normal daily hits by 7am. I checked the weblogs and found that my post was trending on ycombinator.com (Hacker News). So I am going to skip pretty much all background and just post the updated code for now, and will go back and clean up this post at some point.
Without further ado: here’s what the super basic dashboard looks like
I have it separated into two main running python programs, the file that interacts with X-Plane itself, and the Flask part.
Here’s the adjusted autopilot code to check with Redis for the setpoints every loop execution:
# https://onion.io/2bt-pid-control-python/
# https://github.com/ivmech/ivPID
import sys
import os
import xpc
from datetime import datetime, timedelta
import PID
import time
import math, numpy
import redis
r = redis.StrictRedis(host='localhost', port=6379, db=0)
setpoints = {
"desired_roll": 0,
"desired_pitch": 2,
"desired_speed": 160,
"desired_alt": 8000.0,
"desired_hdg": 140,
"autopilot_enabled": 0
}
for key in setpoints:
# if the key exists in the redis db, use it
# otherwise, set it
if r.exists(key):
setpoints[key] = float(r.get(key))
else:
r.set(key, setpoints[key])
update_interval = 0.10 #seconds
update_frequency = 1/update_interval
P = 0.05
I = 0.01
D = 0
MAX_DEFLECTION_PER_SECOND = 2.0
roll_PID = PID.PID(P*2, I*2, D)
roll_PID.SetPoint = setpoints["desired_roll"]
pitch_PID = PID.PID(P, I, D)
pitch_PID.SetPoint = setpoints["desired_pitch"]
altitude_PID = PID.PID(P*2, P/2, D)
altitude_PID.SetPoint = setpoints["desired_alt"]
speed_PID = PID.PID(P, I, D)
speed_PID.SetPoint = setpoints["desired_speed"]
heading_error_PID = PID.PID(1,0.05,0.1)
heading_error_PID.SetPoint = 0 # need heading error to be 0
DREFs = ["sim/cockpit2/gauges/indicators/airspeed_kts_pilot",
"sim/cockpit2/gauges/indicators/heading_electric_deg_mag_pilot",
"sim/flightmodel/failures/onground_any",
"sim/flightmodel/misc/h_ind"]
def normalize(value, min=-1, max=1):
if (value > max):
return max
elif (value < min):
return min
else:
return value
def sleep_until_next_tick(update_frequency):
# Calculate the update interval from the frequency
update_interval = 1.0 / update_frequency
# Get the current time
current_time = time.time()
# Calculate the time remaining until the next tick
sleep_time = update_interval - (current_time % update_interval)
# Sleep for the remaining time
time.sleep(sleep_time)
# https://rosettacode.org/wiki/Angle_difference_between_two_bearings#Python
def get_angle_difference(b1, b2):
r = (b2 - b1) % 360.0
# Python modulus has same sign as divisor, which is positive here,
# so no need to consider negative case
if r >= 180.0:
r -= 360.0
return r
# https://gist.github.com/jeromer/2005586
def get_bearing(pointA, pointB):
"""
Calculates the bearing between two points.
The formulae used is the following:
θ = atan2(sin(Δlong).cos(lat2),
cos(lat1).sin(lat2) − sin(lat1).cos(lat2).cos(Δlong))
:Parameters:
- `pointA: The tuple representing the latitude/longitude for the
first point. Latitude and longitude must be in decimal degrees
- `pointB: The tuple representing the latitude/longitude for the
second point. Latitude and longitude must be in decimal degrees
:Returns:
The bearing in degrees
:Returns Type:
float
"""
if (type(pointA) != tuple) or (type(pointB) != tuple):
raise TypeError("Only tuples are supported as arguments")
lat1 = math.radians(pointA[0])
lat2 = math.radians(pointB[0])
diffLong = math.radians(pointB[1] - pointA[1])
x = math.sin(diffLong) * math.cos(lat2)
y = math.cos(lat1) * math.sin(lat2) - (math.sin(lat1)
* math.cos(lat2) * math.cos(diffLong))
initial_bearing = math.atan2(x, y)
# Now we have the initial bearing but math.atan2 return values
# from -180° to + 180° which is not what we want for a compass bearing
# The solution is to normalize the initial bearing as shown below
initial_bearing = math.degrees(initial_bearing)
compass_bearing = (initial_bearing + 360) % 360
return compass_bearing
# https://janakiev.com/blog/gps-points-distance-python/
def haversine(coord1, coord2):
R = 6372800 # Earth radius in meters
lat1, lon1 = coord1
lat2, lon2 = coord2
phi1, phi2 = math.radians(lat1), math.radians(lat2)
dphi = math.radians(lat2 - lat1)
dlambda = math.radians(lon2 - lon1)
a = math.sin(dphi/2)**2 + \
math.cos(phi1)*math.cos(phi2)*math.sin(dlambda/2)**2
return 2*R*math.atan2(math.sqrt(a), math.sqrt(1 - a))
KBJC_lat = 39.9088056
KBJC_lon = -105.1171944
def write_position_to_redis(position):
# position is a list of 7 floats
# position_elements = [lat, lon, alt, pitch, roll, yaw, gear_indicator]
position_elements = ["lat", "lon", "alt", "pitch", "roll", "yaw", "gear_indicator"]
position_str = ','.join([str(x) for x in position])
r.set('position', position_str)
for i in range(len(position_elements)):
r.set(f"position/{position_elements[i]}", position[i])
# position_str = ','.join([str(x) for x in position])
# r.publish('position_updates', position_str)
def get_setpoints_from_redis():
setpoints = {
"desired_roll": 0,
"desired_pitch": 2,
"desired_speed": 160,
"desired_alt": 8000.0,
"desired_hdg": 140
}
for key in setpoints:
# if the key exists in the redis db, use it
# otherwise, set it
if r.exists(key):
setpoints[key] = float(r.get(key))
else:
r.set(key, setpoints[key])
return setpoints
def get_autopilot_enabled_from_redis():
if r.exists("autopilot_enabled"):
return int(r.get("autopilot_enabled").decode('utf-8')) == 1
ele_positions = []
ail_positions = []
thr_positions = []
def update_control_position_history(ctrl):
ele_positions.append(ctrl[0])
ail_positions.append(ctrl[1])
thr_positions.append(ctrl[3])
# if the list is longer than 20, pop the first element
if len(ele_positions) > 20:
ele_positions.pop(0)
ail_positions.pop(0)
thr_positions.pop(0)
def monitor():
with xpc.XPlaneConnect() as client:
while True:
loop_start = datetime.now()
print(f"loop start - {loop_start}")
posi = client.getPOSI()
write_position_to_redis(posi)
ctrl = client.getCTRL()
bearing_to_kbjc = get_bearing((posi[0], posi[1]), (KBJC_lat, KBJC_lon))
dist_to_kbjc = haversine((posi[0], posi[1]), (KBJC_lat, KBJC_lon))
#desired_hdg = 116 #bearing_to_kbjc
multi_DREFs = client.getDREFs(DREFs) #speed=0, mag hdg=1, onground=2
current_roll = posi[4]
current_pitch = posi[3]
#current_hdg = posi[5] # this is true, need to use DREF to get mag ''
current_hdg = multi_DREFs[1][0]
current_altitude = multi_DREFs[3][0]
current_asi = multi_DREFs[0][0]
onground = multi_DREFs[2][0]
# get the setpoints from redis
setpoints = get_setpoints_from_redis()
desired_hdg = setpoints["desired_hdg"]
desired_alt = setpoints["desired_alt"]
desired_speed = setpoints["desired_speed"]
# outer loops first
altitude_PID.SetPoint = desired_alt
altitude_PID.update(current_altitude)
heading_error = get_angle_difference(desired_hdg, current_hdg)
heading_error_PID.update(heading_error)
speed_PID.SetPoint = desired_speed
new_pitch_from_altitude = normalize(altitude_PID.output, -10, 10)
new_roll_from_heading_error = normalize(heading_error_PID.output, -25, 25)
# if new_pitch_from_altitude > 15:
# new_pitch_from_altitude = 15
# elif new_pitch_from_altitude < -15:
# new_pitch_from_altitude = -15
pitch_PID.SetPoint = new_pitch_from_altitude
roll_PID.SetPoint = new_roll_from_heading_error
roll_PID.update(current_roll)
speed_PID.update(current_asi)
pitch_PID.update(current_pitch)
new_ail_ctrl = normalize(roll_PID.output, min=-1, max=1)
new_ele_ctrl = normalize(pitch_PID.output, min=-1, max=1)
new_thr_ctrl = normalize(speed_PID.output, min=0, max=1)
previous_ail_ctrl = ail_positions[-1] if len(ail_positions) > 0 else 0
previous_ele_ctrl = ele_positions[-1] if len(ele_positions) > 0 else 0
previous_thr_ctrl = thr_positions[-1] if len(thr_positions) > 0 else 0
# not currently functional - need to work on this
# new_ail_ctrl_limited = previous_ail_ctrl + new_ail_ctrl * MAX_DEFLECTION_PER_SECOND / update_frequency
# new_ele_ctrl_limited = previous_ele_ctrl + new_ele_ctrl * MAX_DEFLECTION_PER_SECOND / update_frequency
# new_thr_ctrl_limited = previous_thr_ctrl + new_thr_ctrl * MAX_DEFLECTION_PER_SECOND / update_frequency
# update the control positions
# update_control_position_history((new_ele_ctrl_limited, new_ail_ctrl_limited, 0.0, new_thr_ctrl_limited))
update_control_position_history((new_ele_ctrl, new_ail_ctrl, 0.0, new_thr_ctrl))
onground = -1
if onground == 1:
print("on ground, not sending controls")
else:
if get_autopilot_enabled_from_redis():
# ctrl = [new_ele_ctrl_limited, new_ail_ctrl_limited, 0.0, new_thr_ctrl_limited]
ctrl = [new_ele_ctrl, new_ail_ctrl, 0.0, new_thr_ctrl]
client.sendCTRL(ctrl)
loop_end = datetime.now()
loop_duration = loop_end - loop_start
output = f"current values -- roll: {current_roll: 0.3f}, pitch: {current_pitch: 0.3f}, hdg: {current_hdg:0.3f}, alt: {current_altitude:0.3f}, asi: {current_asi:0.3f}"
output = output + "\n" + f"hdg error: {heading_error: 0.3f}"
output = output + "\n" + f"new ctrl positions -- ail: {new_ail_ctrl: 0.4f}, ele: {new_ele_ctrl: 0.4f}, thr: {new_thr_ctrl:0.4f}"
output = output + "\n" + f"PID outputs -- altitude: {altitude_PID.output: 0.4f}, pitch: {pitch_PID.output: 0.4f}, ail: {roll_PID.output: 0.3f}, hdg: {heading_error_PID.output: 0.3f}"
output = output + "\n" + f"bearing to KBJC: {bearing_to_kbjc:3.1f}, dist: {dist_to_kbjc*0.000539957:0.2f} NM"
output = output + "\n" + f"loop duration (ms): {loop_duration.total_seconds()*1000:0.2f} ms"
print(output)
sleep_until_next_tick(update_frequency)
os.system('cls' if os.name == 'nt' else 'clear')
if __name__ == "__main__":
monitor()
And the flask backend/front end. WebSockets are super cool – never used them before this. I was thinking I’d have to make a bunch of endpoints for every type of autopilot change I need. But this handles it far nicer:
from flask import Flask, render_template
from flask_socketio import SocketIO, emit
import redis
app = Flask(__name__)
socketio = SocketIO(app)
r = redis.StrictRedis(host='localhost', port=6379, db=0)
setpoints_of_interest = ['desired_hdg', 'desired_alt', 'desired_speed']
# get initial setpoints from Redis, send to clients
@app.route('/')
def index():
return render_template('index.html') # You'll need to create an HTML template
def update_setpoint(label, adjustment):
# This function can be adapted to update setpoints and then emit updates via WebSocket
current_value = float(r.get(label)) if r.exists(label) else 0.0
if label == 'desired_hdg':
new_value = (current_value + adjustment) % 360
elif label == 'autopilot_enabled':
new_value = adjustment
else:
new_value = current_value + adjustment
r.set(label, new_value)
# socketio.emit('update_setpoint', {label: new_value}) # Emit update to clients
return new_value
@socketio.on('adjust_setpoint')
def handle_adjust_setpoint(json):
label = json['label']
adjustment = json['adjustment']
# Your logic to adjust the setpoint in Redis and calculate new_value
new_value = update_setpoint(label, adjustment)
# Emit updated setpoint to all clients
emit('update_setpoint', {label: new_value}, broadcast=True)
@socketio.on('connect')
def handle_connect():
# Fetch initial setpoints from Redis
initial_setpoints = {label: float(r.get(label)) if r.exists(label) else 0.0 for label in setpoints_of_interest}
# Emit the initial setpoints to the connected client
emit('update_setpoints', initial_setpoints)
if __name__ == '__main__':
socketio.run(app)
And the http template:
<!DOCTYPE html>
<html>
<head>
<title>Autopilot Interface</title>
<script src="https://cdnjs.cloudflare.com/ajax/libs/socket.io/4.0.1/socket.io.js"></script>
<script type="text/javascript" charset="utf-8">
var socket; // Declare socket globally
// Define adjustSetpoint globally
function adjustSetpoint(label, adjustment) {
socket.emit('adjust_setpoint', {label: label, adjustment: adjustment});
}
document.addEventListener('DOMContentLoaded', () => {
socket = io.connect(location.protocol + '//' + document.domain + ':' + location.port);
socket.on('connect', () => {
console.log("Connected to WebSocket server.");
});
// Listen for update_setpoints event to initialize the UI with Redis values
socket.on('update_setpoints', function(setpoints) {
for (const [label, value] of Object.entries(setpoints)) {
const element = document.getElementById(label);
if (element) {
element.innerHTML = value;
}
}
});
// Listen for update_setpoint events from the server
socket.on('update_setpoint', data => {
// Assuming 'data' is an object like {label: new_value}
for (const [label, value] of Object.entries(data)) {
// Update the displayed value on the webpage
const element = document.getElementById(label);
if (element) {
element.innerHTML = value;
}
}
});
});
</script>
</head>
<body>
<h1>Autopilot Interface</h1>
<p>Current Setpoints:</p>
<ul>
<li>Heading: <span id="desired_hdg">0</span></li>
<li>Altitude: <span id="desired_alt">0</span></li>
<li>Speed: <span id="desired_speed">0</span></li>
</ul>
<p>Autopilot: <span id="autopilot_enabled">0</span></p>
<!-- Example buttons for adjusting setpoints -->
<button onclick="adjustSetpoint('desired_hdg', -10)">-10 HDG</button>
<button onclick="adjustSetpoint('desired_hdg', 10)">+10 HDG</button>
<br>
<button onclick="adjustSetpoint('desired_alt', 500)">+500 ALT</button>
<button onclick="adjustSetpoint('desired_alt', -500)">-500 ALT</button>
<br>
<button onclick="adjustSetpoint('desired_speed', 5)">+5 KTS</button>
<button onclick="adjustSetpoint('desired_speed', -5)">-5 KTS</button>
<br>
<br>
<button onclick="adjustSetpoint('autopilot_enabled', 1)">Enable Autopilot</button>
<button onclick="adjustSetpoint('autopilot_enabled', 0)">Disable Autopilot</button>
</body>
</html>
This should be enough to get you going. I’ll come back and clean it up later (both my kids just woke up – 1.5 and 3.5 years!)